Water Flow Standard Facility LJS Type Water Flow Standard Facility Static Gravimetric Method + Static Volumetric Method + Master Meter Method
1. ລາຍລະອຽດ
ສະຖານທີ່ມາດຕະຖານການໄຫຼຂອງນໍ້າປະເພດ LJS (ຕໍ່ໄປນີ້ເອີ້ນວ່າສິ່ງອໍານວຍຄວາມສະດວກ) ແມ່ນເຄື່ອງມືວັດແທກສະເພາະທີ່ຕ້ອງການໂດຍກົດລະບຽບການຢັ້ງຢືນທາງວັດແທກແຫ່ງຊາດ. ມັນໃຊ້ເຄື່ອງວັດແທກເອເລັກໂຕຣນິກທີ່ມີຄວາມຖືກຕ້ອງສູງ (ມາດຕະຖານປະຖົມ), ມາດຕະຖານມາດຕະຖານໂລຫະ (ມາດຕະຖານປະຖົມ), ແລະເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ (ມາດຕະຖານຮອງ) ເປັນເຄື່ອງມືອ້າງອີງ. ການນໍາໃຊ້ນ້ໍາສະອາດເປັນຂະຫນາດກາງການປັບທຽບ, ແລະອີງໃສ່ກົດລະບຽບການຢັ້ງຢືນແຫ່ງຊາດທີ່ກ່ຽວຂ້ອງແລະຂໍ້ກໍານົດການປັບຂະຫນາດຂອງເຄື່ອງວັດແທກພາຍໃຕ້ການທົດສອບ (MUT), ມັນຢ່າງຕໍ່ເນື່ອງກວດສອບ, calibrate, ແລະການທົດສອບ MUT flowmeter ພາຍໃນໄລຍະເວລາດຽວກັນ. ມັນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໂດຍພະແນກການຊີ້ນໍາດ້ານວິຊາການຂອງ metrology ແຫ່ງຊາດສໍາລັບການຢັ້ງຢືນຄັ້ງທໍາອິດແລະການຢັ້ງຢືນແຕ່ລະໄລຍະຂອງເຄື່ອງມື, ເຊັ່ນດຽວກັນກັບສານຕັດສິນແລະການຕັດສິນຄະດີແພ່ງ. ມັນຍັງເປັນມາດຕະຖານການປະຕິບັດພາຍໃນໃນອຸດສາຫະກໍາເຊັ່ນ: ນໍ້າມັນແລະເຄມີ, ແລະຖືກນໍາໃຊ້ສໍາລັບການທົດສອບການວັດແທກການໄຫຼອັດສະລິຍະໃນການຄົ້ນຄວ້າວິທະຍາສາດ, ການຊີ້ນໍາດ້ານວິຊາການຂອງ metrology, ແລະການຜະລິດເຄື່ອງວັດແທກການໄຫຼ, ສະເຫນີມາດຕະຖານຢ່າງກວ້າງຂວາງແລະສາມາດນໍາໃຊ້ໄດ້. ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງການໂອນມູນຄ່າໃນລະຫວ່າງການເຮັດວຽກການສອບທຽບແລະເສີມຂະຫຍາຍຄວາມຮູ້ທາງດ້ານການຢັ້ງຢືນທາງວັດແທກມືອາຊີບຂອງພະນັກງານ, ໂຄງຮ່າງການຝຶກອົບຮົມນີ້ໄດ້ຖືກສ້າງຂື້ນໂດຍສະເພາະ. ບຸກຄະລາກອນທີ່ມີສ່ວນຮ່ວມໃນວຽກງານການສອບທຽບຂອງສະຖານທີ່ຄາດວ່າຈະເອົາມັນຢ່າງຈິງຈັງ, ສຶກສາຢ່າງຈິງຈັງ, ແລະສອນວິຊານີ້ຢ່າງຄ່ອງແຄ້ວ.
ສິ່ງອໍານວຍຄວາມສະດວກດັ່ງກ່າວໄດ້ລວມເອົາວິທີການປັບຕົວແບບຫຼາຍວິທີ: ວິທີ Gravimetric ຄົງທີ່, ວິທີການ Volumetric ຄົງທີ່, ແລະວິທີ Master Meter. ວິທີການເພີ່ມເຕີມຫຼາຍວິທີນີ້ຊ່ວຍປັບປຸງປະສິດທິພາບການປັບທຽບ ແລະລະດັບສະຕິປັນຍາຂອງສິ່ງອໍານວຍຄວາມສະດວກ, ເຮັດໃຫ້ການປັບທຽບອອນໄລນ໌ ຫຼືການກວດສອບເຄື່ອງວັດແທກການໄຫຼຂອງມາດຕະຖານ, ເຊັ່ນດຽວກັນກັບການປັບ ຫຼືກວດສອບເຄື່ອງວັດແທກການໄຫຼຂອງນໍ້າຕ່າງໆ.
ວິທີການ Gravimetric Static ໃຊ້ຂະຫນາດເອເລັກໂຕຣນິກທີ່ມີຄວາມແມ່ນຍໍາສູງເປັນເອກະສານອ້າງອີງ. ມັນກໍານົດອັດຕາການໄຫຼໂດຍການຊັ່ງນໍ້າຫນັກຂອງມະຫາຊົນທັງຫມົດຂອງນ້ໍາທີ່ໄຫຼເຂົ້າໄປໃນຖັງຊັ່ງນໍ້າຫນັກພາຍໃນໄລຍະເວລາທີ່ກໍານົດໄວ້ແລະການປຽບທຽບມັນກັບການໄຫຼຂອງມະຫາຊົນທີ່ຄິດໄລ່ຈາກ MUT, ດັ່ງນັ້ນການກໍານົດຄວາມຖືກຕ້ອງແລະການເຮັດຊ້ໍາຂອງ MUT. ເກັດເອເລັກໂຕຣນິກສະເຫນີຄວາມແມ່ນຍໍາສູງ; ວິທີການນີ້ສາມາດບັນລຸຄວາມຖືກຕ້ອງ ± 0.05% ແລະມີຂໍ້ໄດ້ປຽບເຊັ່ນ: ແຫຼ່ງການໄຫຼຂອງຄວາມກົດດັນຄົງທີ່, ການໄຫຼທີ່ຫມັ້ນຄົງ, ແລະຄວາມຖືກຕ້ອງຂອງການວັດແທກສູງ.
ວິທີການ Volumetric ຄົງທີ່ໃຊ້ມາດຕະການໂລຫະມາດຕະຖານເປັນການອ້າງອິງ. ເມື່ອປຽບທຽບກັບວິທີການ Gravimetric ຄົງທີ່, ມັນຍັງມີແຫຼ່ງການໄຫຼຂອງຄວາມກົດດັນຄົງທີ່, ການໄຫຼທີ່ຫມັ້ນຄົງ, ແລະຄວາມຖືກຕ້ອງຂອງການວັດແທກສູງ. ຢ່າງໃດກໍຕາມ, ສໍາລັບການກວດສອບການໄຫຼຂະຫນາດໃຫຍ່, ວິທີການ Volumetric Static ຮຽກຮ້ອງໃຫ້ມີມາດຕະການໂລຫະມາດຕະຖານຫຼາຍທີ່ໃຊ້ໃນການປະສົມປະສານ. ການຜະລິດມາດຕະການມາດຕະຖານໂລຫະແມ່ນຂ້ອນຂ້າງຍາກ, ເວລາການປັບທຽບແມ່ນຍາວກວ່າ, ແລະຄວາມຖືກຕ້ອງສູງສຸດທີ່ສາມາດບັນລຸໄດ້ແມ່ນ ± 0.1%.

Master Meter Method ໃຊ້ເຄື່ອງວັດແທກການໄຫຼທີ່ມີຄວາມແມ່ນຍໍາສູງເປັນເຄື່ອງມືອ້າງອີງເພື່ອທົດສອບ MUT. ເຄື່ອງວັດແທກການໄຫຼທີ່ມີຄວາມແມ່ນຍໍາສູງທີ່ໃຊ້ທົ່ວໄປສາມາດບັນລຸຄວາມຖືກຕ້ອງຂອງການວັດແທກປະມານ ± 0.2%. ສໍາລັບການປັບວັດການໄຫຼຂອງການເຮັດວຽກທົ່ວໄປ, ວິທີການກວດສອບນີ້ແມ່ນຂ້ອນຂ້າງງ່າຍດາຍ, ສະດວກ, ແລະປະສິດທິຜົນຄ່າໃຊ້ຈ່າຍ.
ວິທີການສະຖຽນລະພາບຄວາມກົດດັນຂອງສິ່ງອໍານວຍຄວາມສະດວກໄດ້ສົມທົບການ stabilizing ເຮືອແລະການຄວບຄຸມຄວາມຖີ່ຂອງຕົວປ່ຽນແປງ (VFD). ໂດຍການຄວບຄຸມຄວາມໄວ VFD ເພື່ອຄວບຄຸມຄວາມໄວຂອງປັ໊ມ, ການໄຫຼອອກຂອງຂະຫນາດກາງຂອງການປັບຕົວແມ່ນສະຖຽນລະພາບ. ສະຖຽນລະພາບເພີ່ມເຕີມໂດຍເຮືອ stabilizing ຄວບຄຸມການເຫນັງຕີງຂອງຄວາມກົດດັນການໄຫຼເຂົ້າພາຍໃນ 0.2%. ກົດລະບຽບການໄຫຼຂອງລະບົບປະສົມປະສານວາວຄວບຄຸມແລະປັ໊ມມໍເຕີຄວບຄຸມ VFD, ຕອບສະຫນອງຄວາມຕ້ອງການກົດລະບຽບການໄຫຼຂອງເສັ້ນຜ່າສູນກາງທໍ່ຕ່າງໆໃນຂະນະທີ່ຫຼຸດຜ່ອນການບໍລິໂພກພະລັງງານຂອງລະບົບ.
ສະຖານທີ່ທັງຫມົດແມ່ນຄວບຄຸມໂດຍອັດຕະໂນມັດຄອມພິວເຕີເສີມໂດຍການດໍາເນີນງານຄູ່ມື. ມັນຊ່ວຍໃຫ້ການຄວບຄຸມອັດຕະໂນມັດແລະຂໍ້ມູນໄດ້ມາສໍາລັບສະຖານທີ່ທັງຫມົດ, ເຊັ່ນ: ການອ່ານຂະຫນາດເອເລັກໂຕຣນິກ, ການອ່ານມາດຕະການມາດຕະຖານ, ການອ່ານເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ, ການອ່ານ MUT, ການຄວບຄຸມ diverter, ເຄື່ອງສົ່ງຄວາມກົດດັນ, ເຄື່ອງສົ່ງອຸນຫະພູມ, ວາວຄວບຄຸມການໄຫຼ, ແລະການຄວບຄຸມ VFD ແລະຂໍ້ມູນ. ມັນສາມາດປະຕິບັດອັດຕະໂນມັດຈຸດດຽວ, ສາມຈຸດ, ຫ້າຈຸດ, ແລະຫຼາຍຈຸດ, ມີຫນ້າທີ່ສໍາລັບການເກັບຮັກສາຂໍ້ມູນອັດຕະໂນມັດ, ການສອບຖາມ, ການພິມຜົນການປັບທຽບ, ແລະໃບຢັ້ງຢືນການປັບທຽບ. ວິທີການສະຖຽນລະພາບຄວາມກົດດັນໃຊ້ກົດລະບຽບ VFD ແລະວິທີການສະຖຽນລະພາບຂອງເຮືອໂດຍອີງໃສ່ລະດັບການໄຫຼ. ກົດລະບຽບການໄຫຼຂອງລະບົບປະສົມປະສານວາວຄວບຄຸມໄຟຟ້າແລະປັ໊ມມໍເຕີຄວບຄຸມ VFD, ຕອບສະຫນອງຄວາມຕ້ອງການກົດລະບຽບການໄຫຼຂອງເສັ້ນຜ່າສູນກາງຕ່າງໆແລະການຫຼຸດຜ່ອນການບໍລິໂພກພະລັງງານຂອງລະບົບ.
ຜູ້ໃຊ້ສາມາດເລືອກເອົາວິທີການສອບທຽບສະເພາະໂດຍອີງໃສ່ປະເພດຂອງເຄື່ອງວັດທີ່ຈະໄດ້ຮັບການປັບ, ຂໍ້ຈໍາກັດຂອງເວັບໄຊ, ສະພາບເສດຖະກິດ, ແລະອື່ນໆ, ຫຼືລວມເອົາຫຼາຍວິທີການສ້າງສະຖານທີ່ມາດຕະຖານທີ່ສອດຄ້ອງກັນ.
ການອອກແບບສິ່ງອໍານວຍຄວາມສອດຄ່ອງກັບມາດຕະຖານການອຸປະກອນອຸປະກອນການອຸປະກອນການ, ລະບຽບການ, ແລະສະເພາະ:
● JJG 164-2000 Liquid Flow Standard Facility
● JJG 643-2024 Master Meter Method Flow ມາດຕະຖານສິ່ງອໍານວຍຄວາມສະດວກ
● ເຄື່ອງວັດແທກນໍ້າເຢັນ JJG 162-2019
● JJG 257-2007 Float Flowmeters
● JJG 640-2016 ເຄື່ອງວັດແທກຄວາມດັນທີ່ແຕກຕ່າງ
●JJG 667-2010 Liquid Positive Displacement Flowmeters
● JJG 1029-2007 Vortex Flowmeters
●JJG 1030-2007 Ultrasonic Flowmeters
● JJG 1033-2007 ເຄື່ອງວັດແທກກະແສໄຟຟ້າ
● JJG 1037-2008 Turbine Flowmeters
●JJG 1038-2008 Coriolis Mass Flowmeters
2. ເນື້ອໃນຫຼັກ
2.1 ຕົວກໍານົດການດ້ານວິຊາການຕົ້ນຕໍ
2.1.1ວິທີການ Calibration: ວິທີ Gravimetric ຄົງທີ່ + ວິທີການ Volumetric ຄົງທີ່ + ວິທີການ Master Meter.
2.1.2ຄວາມບໍ່ແນ່ນອນຂະຫຍາຍສິ່ງອໍານວຍຄວາມສະດວກ:
* Static Gravimetric Method: 0.05% (*k*=2) Electronic scale verification scale interval e=1/6000;
* ວິທີການ Volumetric ຄົງທີ່: 0.2% (*k*=2) ມາດຕະຖານການເຮັດວຽກມາດຕະຖານຄວາມຜິດພາດສູງສຸດອະນຸຍາດ: ≤±0.5×10⁻³; ຖ້າໃຊ້ມາດຕະການໂລຫະມາດຕະຖານ Class II, Static Volumetric Method ສາມາດເປັນ 0.15% (*k*=2);
* Master Meter Meter: 0.3% (*k*=2) ມາດຕະຖານ flow meter uncertainty 0.2% (*k*=2).
2.1.3ສະຖຽນລະພາບການໄຫຼເຂົ້າ: ≤0.2%.
2.1.4ໄລຍະການໄຫຼ: (0.02 ~ 5000) m³/h (ຫຼືລະດັບການໄຫຼຂອງຜູ້ໃຊ້ທີ່ລະບຸ).
2.1.5ຂໍ້ມູນຈໍາເພາະຂອງ MUT: ເສັ້ນຜ່າສູນກາງ DN4 ~ DN600 (ຫຼືເສັ້ນຜ່າສູນກາງທີ່ກໍານົດໂດຍຜູ້ໃຊ້).
2.1.6ສະຖານີທົດສອບການສອບທຽບ: ສາມາດຕັ້ງໄດ້ຫຼາຍກຸ່ມ, ໂດຍມີທໍ່ທົດສອບການປັບຕັ້ງແບບຂະໜານ. ເສັ້ນຜ່າສູນກາງຂອງສະຖານີການປັບມາດຕະຖານແມ່ນ DN25, DN50, DN80, DN100, DN150, DN200, DN300, DN400, DN500, DN600. ເຄື່ອງວັດແທກການໄຫຼສະເພາະອື່ນໆສາມາດປັບໄດ້ໂດຍການປ່ຽນທໍ່.
2.1.7ປະເພດຂອງ MUTs: ເຄື່ອງວັດແທກການໄຫຼຂອງ turbine, vortex flowmeter, electromagnetic flowmeter, ultrasonic flowmeter, velocity flow meters, differential pressure flowmeter, liquid positive displacement flowmeter, Coriolis mass flow meters, ແລະອື່ນໆ.
2.1.8ສັນຍານ MUT: ສັນຍານກໍາມະຈອນ (ຄວາມຖີ່), ປັດຈຸບັນ (4 ~ 20) mA, ການສື່ສານດິຈິຕອນ RS485, ບໍ່ມີສັນຍານ (ການອ່ານໂດຍກົງ), ແລະອື່ນໆ.
2.1.9Calibration Medium: ນ້ໍາສະອາດ.
2.1.10ຄວາມກົດດັນການເຮັດວຽກ: (0.2 ~ 1.0) MPa (ອີງຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້).
2.1.11ການສະຫນອງພະລັງງານ: DC (5V, 12V, 24V) / 1A, AC220V / 10A.
2.1.12ວິທີການຄວບຄຸມ:
ໃນລະຫວ່າງການປັບ, ສະຖານທີ່ດໍາເນີນງານພາຍໃຕ້ການຄວບຄຸມອັດຕະໂນມັດ. ຫຼັງຈາກການປະຕິບັດດ້ວຍມືທີ່ຈໍາເປັນ (ການຕິດຕັ້ງ MUT, ການເປີດ / ປິດປ່ຽງຄູ່ມື), ວຽກງານການສອບທຽບທີ່ຍັງເຫຼືອແມ່ນສໍາເລັດອັດຕະໂນມັດໂດຍການຄວບຄຸມຄອມພິວເຕີ.
2.1.13ວັດສະດຸສິ່ງອໍານວຍຄວາມສະດວກ:
ຊິ້ນສ່ວນທີ່ຕິດຕໍ່ກັບເຄື່ອງທົດສອບແມ່ນເຮັດດ້ວຍເຫຼັກສະແຕນເລດ 304. ອົງປະກອບອື່ນໆແມ່ນເຮັດດ້ວຍເຫຼັກກາກບອນທີ່ມີສີສໍາເລັດຮູບ.
2.1.14ພື້ນທີ່ຫ້ອງທົດລອງສິ່ງອໍານວຍຄວາມສະດວກ (ສະໜອງໃຫ້ໂດຍຜູ້ໃຊ້):
ສະຖານທີ່ທັງຫມົດໄດ້ຖືກວາງໄວ້ຢ່າງສົມເຫດສົມຜົນເພື່ອປະຫຍັດພື້ນທີ່ແລະຕອບສະຫນອງຄວາມຕ້ອງການຂອງຫ້ອງທົດລອງ.
2.1.15ການຍອມຮັບສິ່ງອໍານວຍຄວາມສະດວກ:
ການຍອມຮັບສຸດທ້າຍຂອງສະຖານທີ່ທັງຫມົດແມ່ນປະຕິບັດໂດຍສະຖາບັນວັດແທກລະດັບຊາດທີ່ກໍານົດໂດຍຜູ້ໃຊ້. ພວກເຂົາເຈົ້າຈະກວດກາ, ປະເມີນຜົນ, ແລະອອກບົດລາຍງານການກວດສອບ / calibration (ໃບຢັ້ງຢືນ). ບົດລາຍງານນີ້ (ໃບຢັ້ງຢືນ) ເຮັດຫນ້າທີ່ເປັນເອກະສານການຍອມຮັບຕົ້ນຕໍ.
ຫນ່ວຍວັດແທກອື່ນໆພາຍໃນສະຖານທີ່, ລວມທັງເຄື່ອງວັດແທກເອເລັກໂຕຣນິກ, ເຄື່ອງວັດແທກມາດຕະຖານໂລຫະ, ເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ, ເຄື່ອງສົ່ງຄວາມກົດດັນ, ເຄື່ອງສົ່ງອຸນຫະພູມ, ເຄື່ອງຈັບເວລາ, ແລະອື່ນໆ, ຈະໄດ້ຮັບການສະຫນອງບົດລາຍງານການກວດສອບ / calibration (ໃບຢັ້ງຢືນ) ທີ່ອອກໃຫ້ໂດຍສະຖາບັນການວັດແທກຕາມກົດຫມາຍຂອງແຂວງຫຼັງຈາກການກວດສອບ.

2.2 ຫຼັກການເຮັດວຽກ
ເມື່ອນໍາໃຊ້ວິທີການ Static Gravimetric Method ສໍາລັບການ calibration, ຂະຫນາດເອເລັກໂຕຣນິກແມ່ນການອ້າງອິງ. ພາຍໃນໄລຍະເວລາທີ່ກໍານົດໄວ້ດຽວກັນ, ມະຫາຊົນຂອງຂະຫນາດກາງ calibration ໄຫຼຜ່ານ MUT ແມ່ນປຽບທຽບກັບມະຫາຊົນທີ່ວັດແທກໂດຍຂະຫນາດເອເລັກໂຕຣນິກ (ຫຼືການໄຫຼຂອງມະຫາຊົນທີ່ຄິດໄລ່ຈາກເວລາທີ່ກໍານົດໄວ້), ກໍານົດຄວາມຖືກຕ້ອງຂອງ MUT ແລະການເຮັດຊ້ໍາອີກ.
ເມື່ອນໍາໃຊ້ວິທີການ Volumetric ຄົງທີ່ສໍາລັບການປັບຕົວວັດແທກການໄຫຼ, MUT ແລະມາດຕະຖານການເຮັດວຽກແມ່ນດໍາເນີນການ synchronously. ພາຍໃນໄລຍະເວລາທີ່ກໍານົດໄວ້ດຽວກັນ, ການໄຫຼຂອງ volumetric ຜ່ານ MUT (ຫຼືປະລິມານສະສົມທີ່ຄິດໄລ່ຈາກເວລາທີ່ກໍານົດໄວ້) ແມ່ນປຽບທຽບກັບປະລິມານທີ່ວັດແທກສະຖິຕິໃນມາດຕະຖານການເຮັດວຽກ, ກໍານົດຄວາມຖືກຕ້ອງຂອງ metrological ແລະ repeatability ຂອງ MUT.
ເມື່ອນໍາໃຊ້ວິທີການວັດແທກແມ່ບົດສໍາລັບການປັບທຽບ, ຂະຫນາດກາງຂອງການປັບທຽບແມ່ນໄຫຼຢ່າງຕໍ່ເນື່ອງຜ່ານທັງ MUT ແລະແມ່ບົດ. ເຄື່ອງວັດແທກແມ່ບົດເຮັດຫນ້າທີ່ເປັນເອກະສານອ້າງອີງ, ເຊື່ອມຕໍ່ເປັນຊຸດກັບ MUT ສໍາລັບການປຽບທຽບທາງ metrological, ກໍານົດຄວາມຖືກຕ້ອງຂອງ MUT ແລະການເຮັດຊ້ໍາອີກ.
2.3 ຂະບວນການໄຫຼ
ຂະຫນາດກາງທົດສອບໄຫຼຈາກຖັງນ້ໍາ, ຜ່ານກຸ່ມສູບ, ເຮືອສະຖຽນລະພາບ, ເຄື່ອງກໍາຈັດອາກາດ / ການກັ່ນຕອງ, ທໍ່ຂະບວນການປັບຕົວ, ກຸ່ມເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ, ກຸ່ມປ່ຽງຄວບຄຸມການໄຫຼ, ຕົວແຍກ, ເຂົ້າໄປໃນຖັງນໍ້າຫນັກ. ຫຼັງຈາກການຊັ່ງນໍ້າຫນັກໂດຍຂະຫນາດເອເລັກໂຕຣນິກ (ຫຼືມາດຕະການມາດຕະຖານໂລຫະ), ມັນກັບຄືນໄປຫາຖັງນ້ໍາ. ການໄຫຼຂອງລະບົບແມ່ນຖືກກໍານົດໂດຍການຊັ່ງນໍ້າຫນັກຂອງແຫຼວທີ່ໄຫຼເຂົ້າໄປໃນຖັງຊັ່ງນໍ້າຫນັກ (ຫຼືການວັດແທກຄວາມອາດສາມາດຂອງມາດຕະການໂລຫະມາດຕະຖານ).
ຕິດ MUT ໃສ່ທໍ່ທົດສອບທີ່ສອດຄ້ອງກັນ. ເລີ່ມຕົ້ນລະບົບການເກັບຮັກສານ້ໍາໄຫຼວຽນທີ່ສອດຄ້ອງກັນແລະລະບົບສະຖຽນລະພາບຄວາມກົດດັນ. ປັບການເປີດວາວຄວບຄຸມ, ຄວາມໄວການໄຫຼປານກາງ, ແລະຄວາມດັນຂອງທໍ່ເພື່ອບັນລຸ ແລະສະຖຽນລະພາບໃນອັດຕາການໄຫຼວຽນທີ່ຕ້ອງການ. ຂະຫນາດກາງການທົດສອບໄຫຼຜ່ານ MUT ແລະມາດຕະຖານການເຮັດວຽກຂອງການໄຫຼ (ຂະຫນາດເອເລັກໂຕຣນິກ, ມາດຕະຖານມາດຕະຖານໂລຫະ, ເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ). ປະຕິບັດ MUT ແລະມາດຕະຖານການເຮັດວຽກແບບ synchronously, ປຽບທຽບມູນຄ່າການໄຫຼເຂົ້າຂອງຜົນຜະລິດຂອງພວກເຂົາເພື່ອກໍານົດຄວາມຖືກຕ້ອງແລະຄວາມສາມາດໃນການເຮັດຊ້ໍາຂອງ MUT. ຄ່າມາດຕະຖານທີ່ເກັບລວບລວມໄດ້ synchronously ແລະຄ່າ MUT ເຂົ້າໄປໃນລະບົບຄອມພິວເຕີສໍາລັບການປະມວນຜົນຂໍ້ມູນ. ໂດຍອີງໃສ່ວິທີການປັບທຽບທີ່ແຕກຕ່າງກັນ, ຂະບວນການຄວບຄຸມອອກສັນຍານການຄວບຄຸມທີ່ແຕກຕ່າງກັນຕາມຄວາມຕ້ອງການເພື່ອນໍາຕົວກາງການທົດສອບໄປສູ່ອັດຕາການໄຫຼຂອງຈຸດທົດສອບອື່ນ. ເຮັດຊ້ໍາການດໍາເນີນງານຂ້າງເທິງຈົນກ່ວາຈຸດໄຫຼທັງຫມົດຈະຖືກປັບ. ສຸດທ້າຍ, ຄິດໄລ່ຜົນການສອບທຽບໂດຍອີງໃສ່ລະບຽບການຢັ້ງຢືນ, ເກັບຮັກສາໃຫ້ເຂົາເຈົ້າ, ແລະພິມບົດລາຍງານແລະໃບຢັ້ງຢືນ.
2.4 ອົງປະກອບຂອງສິ່ງອໍານວຍຄວາມສະດວກ
2.4.1ລະບົບການເກັບຮັກສານ້ໍາໄຫຼວຽນແລະສະຖຽນລະພາບ
ປະກອບດ້ວຍຖັງນ້ໍາ, ປັ໊ມ, ລະບົບ VFD, ເຮືອສະຖຽນລະພາບ, ເຄື່ອງກໍາຈັດອາກາດ / ການກັ່ນຕອງ, ທໍ່ເຊື່ອມຕໍ່, ປ່ຽງປະຕູຄູ່ມື, ປ່ຽງກວດ, ແລະຕົວເຊື່ອມຕໍ່ທີ່ມີຄວາມຍືດຫຍຸ່ນ, ແລະອື່ນໆ.
A. ປໍ້າພະລັງງານ
ປໍ້າ centrifugal ທີ່ປະຫຍັດພະລັງງານ, ການສັ່ນສະເທືອນຕ່ໍາ, ສຽງຕ່ໍາໄດ້ຖືກເລືອກ. ພວກມັນກວມເອົາຂອບເຂດການໄຫຼຂອງທີ່ຕ້ອງການໂດຍທໍ່ການປັບຕົວຂອງສິ່ງອໍານວຍຄວາມສະດວກ ແລະ ປະກອບຫຼັກການຂອງປະສິດທິພາບພະລັງງານ ແລະເສດຖະກິດທີ່ເໝາະສົມພາຍໃຕ້ຫຼັກໝາຍຂອງລະບຽບການໄຫຼເຂົ້າຂອງກອງປະຊຸມ. ປັ໊ມຫຼາຍສາມາດຖືກນໍາໃຊ້ຮ່ວມກັນຫຼືປັ໊ມດຽວສາມາດຄວບຄຸມ VFD ເປັນເອກະລາດເພື່ອຕອບສະຫນອງລະດັບການໄຫຼຂອງທໍ່ການປັບຕົວ.
ຫົວປັ໊ມຖືກເລືອກຢ່າງສົມເຫດສົມຜົນໂດຍອີງໃສ່ friction ຂອງທໍ່ທີ່ຄິດໄລ່ແລະການສູນເສຍໃນທ້ອງຖິ່ນຈາກປ່ຽງປ່ຽງໄປຫາທໍ່ທໍ່, ບວກກັບຄວາມສູງຈາກຫນ້າດິນຂອງຖັງໄປຫາທໍ່ diverter ແລະທໍ່ສົ່ງຄືນ, ການສູນເສຍການດູດຂອງປັ໊ມ, ແລະຄວາມຕ້ອງການຄວາມກົດດັນໃນການເຮັດວຽກສໍາລັບການປັບທຽບ. ປະສິດທິພາບການໄຫຼຂອງປັ໊ມໃຊ້ຄ່າລະດັບປານກາງ.
ປັ໊ມຖືກອອກແບບແລະຜະລິດໂດຍໃຊ້ຕົວແບບໄຮໂດຼລິກທີ່ເຫມາະສົມທີ່ສຸດທີ່ທັນສະໄຫມ, ມີທໍ່ກ້ຽວວຽນ, ການດູດຕາມແນວນອນ, ການໄຫຼຕາມແນວຕັ້ງ, ແລະມີເສັ້ນຜ່າກາງຂາເຂົ້າ / ທໍ່ດຽວກັນ. ການເຊື່ອມຕໍ່ມໍເຕີໂດຍກົງຮັບປະກັນ shafts concentric, ການດໍາເນີນງານທີ່ຫມັ້ນຄົງແລະເຊື່ອຖືໄດ້, ຮັບປະກັນຄວາມຫມັ້ນຄົງຂອງ pump outlet ຄວາມກົດດັນທີ່ມີຄວາມກົດດັນຫນ້ອຍແລະການໄຫຼເຂົ້າ, ອໍານວຍຄວາມສະດວກໃນການຄວບຄຸມແລະລະບຽບການ.
ມາດຕະການຫຼຸດຜ່ອນການສັ່ນສະເທືອນແລະການໂດດດ່ຽວແມ່ນຖືກນໍາໃຊ້ໃນລະຫວ່າງການຕິດຕັ້ງປັ໊ມ. ຕົວເຊື່ອມຕໍ່ແບບຍືດຫຍຸ່ນໄດ້ຖືກຕິດຕັ້ງຢູ່ປໍ້າເຂົ້າ / ປ່ຽງເພື່ອຫຼຸດຜ່ອນການສັ່ນສະເທືອນຢ່າງມີປະສິດທິພາບ. ປ່ຽງກວດປິດຊ້າແມ່ນຕິດຕັ້ງຢູ່ໃນທໍ່ອອກເພື່ອປ້ອງກັນການໄຫຼຄືນ, ມີມາດຕະການຫຼຸດຜ່ອນຄວາມກົດດັນເພື່ອກໍາຈັດໄມ້ຄ້ອນນ້ໍາ. ມໍເຕີປະຕິບັດການພະລັງງານຢ່າງມີປະສິດທິພາບດ້ວຍການປົກປ້ອງ over-current/overload. ຫົວດູດທາງບວກແມ່ນໃຊ້ເພື່ອຫຼີກເວັ້ນບັນຫາການລະບາຍອາກາດ ແລະ priming.
B. ເຮືອສະຖຽນລະພາບ
ວິທີການສະຖຽນລະພາບຄວາມກົດດັນຂອງສະຖານທີ່ແມ່ນ stabilization ເຮືອ + ລະບຽບການ VFD, ໃຊ້ເພື່ອຫຼຸດຜ່ອນການໄຫຼແລະຄວາມກົດດັນທີ່ເຫນັງຕີງໃນລະຫວ່າງການກວດພົບ. ມັນສະຫນອງຄວາມກົດດັນທີ່ຫມັ້ນຄົງສໍາລັບລະບົບ, ລົບລ້າງຄວາມຖີ່ສູງ pulsation ແລະຄື້ນຊ໊ອກຈາກປັ໊ມ, ແລະເອົາຟອງ entrained ໃນຂະຫນາດກາງ calibration ໄດ້. The stabilizing vessel averages , buffers , ແລະ absorbs pulsations ຄວາມກົດດັນຂອງນ້ໍາ, ຮັບປະກັນການເຫນັງຕີງຂອງຄວາມກົດດັນການໄຫຼເຂົ້າຂອງຜົນຜະລິດຄົງທີ່ພາຍໃນ 0.2%, ເຮັດໃຫ້ນ້ໍາໃນທໍ່ calibration ຕອບສະຫນອງຢ່າງເຕັມສ່ວນຄວາມຕ້ອງການຂອງການໄຫຼຄົງທີ່ໄລຍະດຽວ.
ອີງຕາມມູນຄ່າການເຫນັງຕີງຂອງປ່ຽງປ່ຽງ, ມູນຄ່າຄວາມຫມັ້ນຄົງຂອງເຮືອ, ແລະເສັ້ນຜ່າກາງຂາເຂົ້າ / ທໍ່ອອກ, ຄິດໄລ່ສໍາລັບການໄຫຼສູງສຸດເພື່ອຄວາມອາດສາມາດຂອງເຮືອອອກແບບສົມເຫດສົມຜົນ, ປະລິມານແລະຄວາມກົດດັນສູງສຸດ. ວັດສະດຸສາມາດເປັນສະແຕນເລດ 304 ຫຼືເຫຼັກກາກບອນ.
ເຮືອດັ່ງກ່າວມີ baffles ຕັ້ງ, ສາມ baffles gradient ອອກຕາມລວງນອນທີ່ມີຕາຂ່າຍໄຟຟ້າ perforated. baffle ແນວຕັ້ງແບ່ງເຮືອເຂົ້າໄປໃນຫ້ອງ inlet ແລະ outlet. ຂະຫນາດກາງເຂົ້າໄປໃນ, ໄຫຼຂຶ້ນ / ລົງເນື່ອງຈາກ baffle ແລະ buffer, turbulence ແມ່ນຫຼຸດລົງຕື່ມອີກໂດຍ baffles ອອກຕາມລວງນອນແລະ cushion ອາກາດເທິງ, ຫຼັງຈາກນັ້ນເຂົ້າໄປໃນຫ້ອງ outlet ໂດຍຜ່ານການ overflow ເຂົ້າໄປໃນທໍ່. ອັນນີ້ດູດຊຶມ ແລະ buffers ຄື້ນຊ໊ອກ pulsation ຄວາມຖີ່ສູງ, ກໍາຈັດ pulsation ກະຕຸ້ນໂດຍ pump, ເຮັດຫນ້າທີ່ເປັນ stabilizer ຄວາມກົດດັນແລະ unloader. ການປ່ຽນແປງຄວາມກົດດັນຂອງລະບົບເລັກນ້ອຍແມ່ນ buffed ໂດຍອັດຕະໂນມັດການຂະຫຍາຍ / ການຫົດຕົວຂອງຊ່ອງ cushion ອາກາດຂ້າງເທິງເຮືອ.
ການອອກແບບແລະການຜະລິດປະຕິບັດຕາມ GB150-2011 "Steel Pressure Vessels" ແລະ "Pressure Vessel Safety Technology Supervision Regulation". Flanges ປະຕິບັດຕາມ GB150-2011 ແລະ GB/T 9112~9124-2010 "Flanges ທໍ່ເຫຼັກ". ເອກະສານຄວາມປອດໄພຄົບຖ້ວນແມ່ນສະຫນອງໃຫ້ (ໃບອະນຸຍາດການຜະລິດ, ໃບຢັ້ງຢືນຄຸນນະພາບ, ໃບຢັ້ງຢືນການຊີ້ນໍາອຸປະກອນພິເສດ, ໄຟລ໌ການອອກແບບ, ຄູ່ມືການຕິດຕັ້ງ / ບໍາລຸງຮັກສາ).
ອຸປະກອນເສີມຂອງເຮືອປະກອບມີເຄື່ອງວັດຄວາມດັນ, ປ່ຽງລະບາຍນໍ້າ, ປ່ຽງຄວາມປອດໄພຍົກເຕັມທີ່ບັນຈຸພາກຮຽນ spring, ທໍ່, ແລະອຸປະກອນເສີມ.
C. ລະບົບ VFD
ສິ່ງອໍານວຍຄວາມສະດວກດັ່ງກ່າວມີລະບົບ VFD ແບບຫນຶ່ງຕໍ່ຫນຶ່ງ. ຫນ້າທີ່ຂອງມັນ: 1) ຫຼີກເວັ້ນການຜົນກະທົບຂອງຕາຂ່າຍໄຟຟ້າໃນລະຫວ່າງການປ່ຽນຄວາມຖີ່ຂອງພະລັງງານ, 2) ໃຫ້ແນ່ໃຈວ່າປັ໊ມເຮັດວຽກພາຍໃຕ້ການຄວບຄຸມ VFD ສະເຫມີເພື່ອໃຫ້ລະບົບການໄຫຼວຽນຂອງລະບົບງ່າຍຂຶ້ນແລະການປະຫຍັດພະລັງງານ. ລະບົບສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍຕູ້ starter, VFD, ສາຍເຊື່ອມຕໍ່, ແລະອື່ນໆ VFD ດຽວຄວບຄຸມມໍເຕີປັ໊ມດຽວ (ລະດັບຄວາມໄວທີ່ດີທີ່ສຸດ: 35Hz ~ 50Hz). ການຄວບຄຸມ PID ແມ່ນໃຊ້ສໍາລັບການຄວບຄຸມການໄຫຼແລະຄວາມກົດດັນ. VFDs ໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນຕູ້ທີ່ມີຫນ້າທີ່ຢຸດທ້ອງຖິ່ນ / ສຸກເສີນ, ການຄວບຄຸມດ້ວຍມື, ແລະການຄວບຄຸມຫ່າງໄກສອກຫຼີກຂອງຄອມພິວເຕີ. ເພື່ອຄວາມປອດໄພ, ມີການເພີ່ມການຖ່າຍທອດຄວາມຮ້ອນພາຍໃນຕູ້ເພື່ອປ້ອງກັນກະແສໄຟເກີນ/ການໂຫຼດເກີນ.
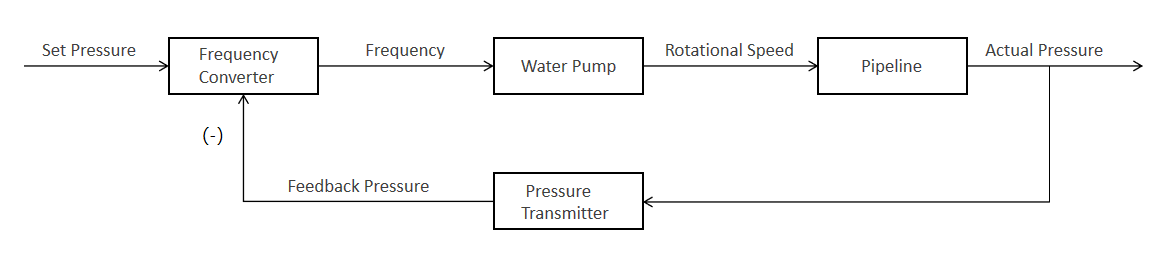
ໃນລະຫວ່າງການປະຕິບັດງານ, ມໍເຕີປັ໊ມທີ່ຄວບຄຸມໂດຍ VFD ເສີມລະດັບການໄຫຼທີ່ບໍ່ສາມາດບັນລຸໄດ້ໂດຍປັ໊ມທີ່ມີຄວາມໄວຄົງທີ່. ການດໍາເນີນງານ VFD ຄວນຫຼີກເວັ້ນຂອບເຂດຈໍາກັດຕ່ໍາເພື່ອປ້ອງກັນບໍ່ໃຫ້ເຂດຕາຍແລະລະບຽບການທີ່ບໍ່ແມ່ນເສັ້ນ. ການໄຫຼທີ່ຫມັ້ນຄົງຜ່ານ MUT ຮຽກຮ້ອງໃຫ້ມີຄວາມແຕກຕ່າງຄວາມກົດດັນທີ່ຫມັ້ນຄົງໃນທົ່ວມັນ. ການຄວບຄຸມຄວາມຫມັ້ນຄົງຂອງຄວາມກົດດັນຂອງນ້ໍາແມ່ນສໍາຄັນຕໍ່ກັບຄວາມຫມັ້ນຄົງຂອງການໄຫຼ. ກົດລະບຽບຄວາມກົດດັນ VFD ໃຊ້ PID algorithms; ປະສິດທິພາບຂອງມັນກໍານົດໂດຍກົງປະສິດທິພາບຂອງລະບົບ. ການປະຕິບັດສາມາດເປັນດັ່ງຕໍ່ໄປນີ້:
ໃຊ້ PLC ເປັນຜູ້ຄວບຄຸມ (ຫຼັກການທີ່ສະແດງຢູ່ຂ້າງລຸ່ມນີ້). ຂໍ້ດີ: ການຕອບສະຫນອງໄວ, ການນໍາໃຊ້ວິທີການການຄວບຄຸມຂອງຜູ້ຜະລິດ VFD, ປັບປຸງຄວາມຫມັ້ນຄົງຂອງລະບຽບການ.
Relays ຄວາມຮ້ອນໃນຕູ້ VFD ສະຫນອງການປົກປ້ອງ over-current / overload. VFDs ຍັງເຮັດຫນ້າທີ່ເປັນຕົວເລີ່ມຕົ້ນອ່ອນ, ປົກປ້ອງປັ໊ມໄດ້ດີ.
D. Air Eliminator/Filter
ພິຈາລະນາລະບົບການຊັ່ງນໍ້າຫນັກເປັນຂະບວນການເປີດ, ຂະຫນາດກາງການທົດສອບສາມາດສ້າງ impurities ແລະຟອງໃນລະຫວ່າງການກວດພົບ, ນໍາໄປສູ່ຄວາມຜິດພາດການວັດແທກແລະຄວາມເສຍຫາຍທີ່ອາດມີມາດຕະຖານແລະ MUT flowmeter. ເຄື່ອງກຳຈັດ/ເຄື່ອງກອງອາກາດຂະໜາດທີ່ເໝາະສົມຖືກຕິດຕັ້ງຢູ່ບ່ອນອອກຂອງເຮືອຄົງທີ່ເພື່ອແຍກອອກ ແລະ ກຳຈັດອາຍແກັສ ແລະ ສິ່ງສົກກະປົກອອກຈາກທໍ່, ຮັບປະກັນປະສິດທິພາບຂອງສິ່ງອຳນວຍຄວາມສະດວກ.
ການອອກແບບຢ່າງສົມເຫດສົມຜົນ, ປະລິມານ, ແລະຄວາມກົດດັນສູງສຸດ nominal. ໂຄງສ້າງຂອງຫອຍກະບອກທີ່ມີປ່ຽງລະບາຍອາກາດເທິງ, ປ່ຽງລະບາຍນ້ໍາທາງລຸ່ມ, ໄສ້ກອງພາຍໃນ, ເຂດການລວບລວມອາກາດ, ແຜ່ນປຽກ, ຫນ້າຈໍການກັ່ນຕອງ perforated. ວັດສະດຸຕິດຕໍ່ກັບຂະຫນາດກາງ: ສະແຕນເລດ 304; ພາກສ່ວນອື່ນໆ: ເຫຼັກກາກບອນ painted.
2.4.2ລະບົບມາດຕະຖານ Metrologic
ລະບົບມາດຕະຖານວັດແທກຂອງສະຖານທີ່ໃຊ້:
* ເຄື່ອງຊັ່ງອີເລັກໂທຣນິກທີ່ມີຄວາມແມ່ນຍໍາສູງເປັນເອກະສານອ້າງອີງສໍາລັບວິທີການ Gravimetric.
* ມາດ ຕະ ຖານ ການ ເຮັດ ວຽກ ເປັນ ກະ ສານ ອ້າງ ອີງ ສໍາ ລັບ ວິ ທີ ການ Volumetric ໄດ້.
* ມາດຕະຖານການໄຫຼຂອງການກະສານອ້າງອີງສໍາລັບວິທີການວັດແມ່ບົດ.
ຕົ້ນຕໍແມ່ນປະກອບດ້ວຍປ່ຽງປິດ, ປ່ຽງຄວບຄຸມການໄຫຼ, diverter, ຖັງບັນຈຸນໍ້າຫນັກ, ຂະຫນາດເອເລັກໂຕຣນິກທີ່ມີຄວາມແມ່ນຍໍາສູງ (ຫຼືມາດຕະການມາດຕະຖານໂລຫະ), ທໍ່ຂະບວນການ, ແລະອື່ນໆ.
A. ລະບົບຊັ່ງນໍ້າໜັກ Gravimetric (ເຄື່ອງຊັ່ງເອເລັກໂຕຣນິກ)
ລະບົບຮອງຮັບການປັບ MUTs ຢູ່ທີ່ຈຸດໄຫຼສູງສຸດ ແລະນາທີ. ລະບົບການຊັ່ງນໍ້າຫນັກທີ່ແຕກຕ່າງກັນ (ເກັດ) ສາມາດເລືອກໄດ້ໂດຍອີງໃສ່ອັດຕາການໄຫຼ.
ຕົວຢ່າງ: ລະບົບການຊັ່ງນໍ້າໜັກ 4 ໜ່ວຍຕອບສະໜອງໄດ້ຄວາມຕ້ອງການການປັບທຽບ:
* ກຸ່ມ 1: ຂະຫນາດ 12000kg, ບັນຈຸນ້ໍາຫນັກ 12000L, DN300 diverter, backpressure line.
* ກຸ່ມ 2: ຂະຫນາດ 3000kg, ບັນຈຸນ້ໍາຫນັກ 3000L, DN100 diverter, backpressure line.
* ກຸ່ມ 3: ຂະຫນາດ 600kg, ບັນຈຸນ້ໍາຫນັກ 600L, DN50 diverter, backpressure line.
* ກຸ່ມ 4: ຂະຫນາດ 120kg, ບັນຈຸນ້ໍາຫນັກ 120L, diverter DN25, ສາຍ backpressure.
ເວທີການຂະຫນາດປະກອບດ້ວຍການຊັ່ງນໍ້າຫນັກຂອງຮ່າງກາຍແລະກອບ, ມີ sensor overload ປ້ອງກັນ, ການໂຕ້ຕອບການສື່ສານມາດຕະຖານ (e. g. RS232 / RS485), ເຊື່ອມຕໍ່ກັບຈໍສະແດງຜົນທ້ອງຖິ່ນຫຼືລະບົບການຄວບຄຸມ, ມີຫນ້າທີ່ອັດຕະໂນມັດ tare.
B. ບັນຈຸນໍ້າໜັກ
ຖັງບັນຈຸນໍ້າໜັກຖືຕົວກາງທົດສອບໃນລະຫວ່າງການປັບຕົວ Gravimetric. ໂຄງສ້າງ: ຖັງສະແຕນເລດຮອບທີ່ກົງກັບຂະຫນາດຂອງເວທີ. ຄວາມຫນາຂອງກໍາແພງຕອບສະຫນອງຄວາມຕ້ອງການນ້ໍາຫນັກແລະຄວາມເຂັ້ມແຂງ, ຮັບປະກັນບໍ່ໃຫ້ມີການຜິດປົກກະຕິໃນໄລຍະການນໍາໃຊ້ໃນໄລຍະຍາວ.
ຕົວຢ່າງ: ສີ່ຖັງ: 12000L, 3000L, 600L, 120L. ເວລາລະບາຍນ້ໍາສໍາລັບຖັງທັງຫມົດ≤40s.
ມາພ້ອມກັບເຊັນເຊີລະດັບ, ປ່ຽງລະບາຍນ້ໍາ, ທໍ່ລະບາຍນ້ໍາ, ແລະອື່ນໆ, ມີຫນ້າທີ່ເຊັ່ນ: ການກວດສອບລະດັບຂອງແຫຼວ, ສັນຍານເຕືອນເກີນຂອບເຂດຈໍາກັດ, ການຕື່ມຂໍ້ມູນຕ້ານການ splash, ແລະການລະບາຍນ້ໍາໄວ. ການອອກແບບພິຈາລະນາພື້ນທີ່ແລະຄວາມເຂັ້ມແຂງ: ສະແຕນເລດໄດ້ຕະຫຼອດ, ຕາຂ່າຍໄຟຟ້າທິດທາງເທິງ, ທໍ່ທໍ່ນ້ໍາ / valve; stabilizers ການໄຫຼເຂົ້າຂອງສະລັອດຕິງພາຍໃນຮູບຊົງ welded ເທົ່າທຽມກັນເພື່ອກໍາຈັດຟອງແລະ swirling ທີ່ເກີດຈາກການເຫນັງຕີງຂອງການໄຫຼ, ສະຫນອງການກໍາຈັດອາກາດແລະສະຖຽນລະພາບການໄຫຼ. ວັດສະດຸ: ສະແຕນເລດ 304.
C. ລະບົບການວັດແທກປະລິມານ (ມາດຕະການມາດຕະຖານການເຮັດວຽກ)
ອອກແບບ, ຜະລິດ, ແລະເລືອກຢ່າງເຂັ້ມງວດຕາມ JJG259-2005 "ການຢັ້ງຢືນມາດຕະການມາດຕະຖານໂລຫະ" ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງ, ຄວາມຫມັ້ນຄົງ, ແລະຄວາມຫນ້າເຊື່ອຖືສໍາລັບການປັບຕົວວັດແທກການໄຫຼຂອງນ້ໍາ. ຮອງຮັບຈຸດໄຫຼສູງສຸດ, ຂັ້ນຕ່ຳ, ແລະລະດັບປານກາງ MUT. ສະຖານີວັດແທກທີ່ແຕກຕ່າງກັນ (ມາດຕະການ) ສາມາດເລືອກໄດ້ໂດຍອີງໃສ່ອັດຕາການໄຫຼ.
ຕົວຢ່າງ: ສາມມາດຖານການເຮັດວຽກ:
* GBJ-10000L (ປະເພດຄວາມສູງດຽວ), ໄລຍະການໄຫຼ (300 ~ 1150) m³/h.
* GBJ-3000L (ປະເພດລວມ: 1000L+2000L), ລະດັບການໄຫຼ (70 ~ 300) m³ / h.
* GBJ-700L (ປະເພດປະສົມ: 200L+500L), ລະດັບການໄຫຼ (0.9~70) m³/h.
ມາດຕະການປະກອບດ້ວຍຄໍວັດແທກ, ທໍ່ລະດັບ, ຂະຫນາດຄໍວັດແທກ, ໂກນເທິງ, ຮ່າງກາຍເປັນຮູບທໍ່ກົມ, ໂກນຕ່ໍາ, ປ່ຽງລະບາຍນ້ໍາ, ຂາຕັ້ງ, ແລະອົງປະກອບລະດັບ. ວັດສະດຸຕິດຕໍ່ກັບຂອງແຫຼວ: ສະແຕນເລດ 304.
ປ່ຽງທໍ່ລະບາຍນ້ໍາແມ່ນທໍ່ລົມ, ປະກອບດ້ວຍການດໍາເນີນງານທີ່ມີຄວາມຍືດຫຍຸ່ນ, ການຜະນຶກທີ່ດີ, ແລະປະສິດທິພາບທີ່ຫມັ້ນຄົງ.
D. Diverter
diverter ເປັນອົງປະກອບທີ່ສໍາຄັນໃນອຸປະກອນການໄຫຼຂອງຂອງແຫຼວ. ມັນປ່ຽນທິດທາງການໄຫຼຂອງຂອງແຫຼວຢ່າງໄວວາ, ຢ່າງຖືກຕ້ອງສັກຢາຂອງແຫຼວທີ່ໄຫຼຜ່ານ MUT ເຂົ້າໄປໃນຖັງຊັ່ງນໍ້າຫນັກໂດຍບໍ່ມີການ bypass ພາຍໃນເວລາທີ່ກໍານົດໄວ້. ມັນເປັນຕົວກໍານົດການທີ່ສໍາຄັນໃນການປະເມີນຄວາມບໍ່ແນ່ນອນຂອງສະຖານທີ່.
ເຄື່ອງຈັກເປີດ pneumatic ພັດທະນາຕົນເອງຂອງພວກເຮົານໍາໃຊ້ໂຄງສ້າງເປີດ, ການດໍາເນີນງານທີ່ຫມັ້ນຄົງ, ຕອບສະຫນອງຄວາມຕ້ອງການສະຖານທີ່, ຮັບປະກັນບໍ່ໃຫ້ splashing ຫຼື flow diversion ໃນລະຫວ່າງການປະຕິບັດງານ. ຜົນກະທົບຕໍ່ການເໜັງຕີງຂອງຄວາມກົດດັນຕໍ່ການໄຫຼເຂົ້າລະຫວ່າງການໄຫຼເຂົ້າທີ່ສູງສຸດແມ່ນຄ່າຄົງທີ່.
Diverter ຖືກຈັບຄູ່ຫນຶ່ງຕໍ່ຫນຶ່ງທີ່ມີຂະຫນາດ (ຫຼືການວັດແທກ) ສະຖານີ. diverter ເສັ້ນຜ່າສູນກາງແລະປະລິມານໄດ້ຖືກອອກແບບສົມເຫດສົມຜົນ. ການປະຕິບັດແມ່ນແສງສະຫວ່າງ, ການເຄື່ອນໄຫວ axial linear, ການຕໍ່ຕ້ານຕ່ໍາ, ການປະຕິບັດໄວ, ຄວາມແຕກຕ່າງກັນທີ່ໃຊ້ເວລາຄວາມຫຼາກຫຼາຍຂະຫນາດນ້ອຍ, ຕອບສະຫນອງລະບຽບການຢັ້ງຢືນທີ່ກ່ຽວຂ້ອງ.
ຕົວກໍານົດການດ້ານວິຊາການ: ໄລຍະເວລາການຫມຸນຄັ້ງດຽວ ≤200ms, ຄວາມແຕກຕ່າງກັນໄລຍະເວລາການເດີນທາງ ≤20ms, ຄວາມບໍ່ແນ່ນອນ 0.02%, ຄວາມກົດດັນແຫຼ່ງອາກາດ (0.4 ~ 0.6) MPa, ວັດສະດຸຕິດຕໍ່ກັບຂະຫນາດກາງ: ສະແຕນເລດ 304.
E. ເຄື່ອງວັດແທກກະແສໄຟຟ້າມາດຕະຖານ (ແມ່ພິມແມັດ)
ເຄື່ອງວັດແທກການໄຫຼຂອງແມ່ເຫຼັກໄຟຟ້າຖືກນໍາໃຊ້ຕົ້ນຕໍເປັນເຄື່ອງວັດແທກແມ່ແບບ, ລະດັບຄວາມຖືກຕ້ອງ ≤0.2, ການເຮັດເລື້ມຄືນ ≤0.06%. ແມັດເຫຼົ່ານີ້ຍັງໃຊ້ເປັນຕົວຊີ້ວັດມາດຕະຖານສໍາລັບການຕິດຕາມການໄຫຼທັນທີໃນລະຫວ່າງການປັບຕົວ Gravimetric. ໂດຍການຕິດຕາມການໄຫຼທັນທີຂອງແມ່ບົດ, ຄວາມຖີ່ VFD ແລະການຄວບຄຸມການເປີດປ່ຽງໄດ້ຖືກປັບເພື່ອໃຫ້ບັນລຸການໄຫຼທັນທີທີ່ຕ້ອງການໃນທໍ່. ຄວາມໄວການໄຫຼຂອງມາດຕະຖານແມ່ນໂດຍປົກກະຕິ (0.5 ~ 5) m/s, ຕອບສະຫນອງຄວາມຕ້ອງການສູງສຸດການໄຫຼຂອງສະຖານທີ່. ເຄື່ອງວັດແທກແມ່ບົດສາມາດຕິດຕາມໄດ້ອອນໄລນ໌ໂດຍຜ່ານວິທີການ Gravimetric, ຮັບປະກັນການກວດສອບຄວາມຖືກຕ້ອງແລະເຊື່ອຖືໄດ້ໃນຂະນະທີ່ການກໍາຈັດການເຮັດວຽກທີ່ສັບສົນຂອງ disassembly / reassembly ສໍາລັບການຢັ້ງຢືນແມັດ.
2.4.3ລະບົບທໍ່ທົດສອບ Calibration
ປະກອບມີສະຖານີທົດສອບການປັບຕົວ, manifold, ເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ, ທໍ່ຂະບວນການ, ແລະອື່ນໆ, ໂດຍມີເຄື່ອງສົ່ງຄວາມກົດດັນ, ເຄື່ອງສົ່ງອຸນຫະພູມ, ປ່ຽງບານ pneumatic, ປ່ຽງຄວບຄຸມການໄຫຼຂອງໄຟຟ້າ, ອຸປະກອນຍຶດທໍ່ pneumatic, ປ່ຽງທໍ່ລະບາຍນ້ໍາ, ປ່ຽງທໍ່ລະບາຍອາກາດ, ກົນໄກການລ້າງທໍ່, ອຸປະກອນເສີມ, MUT workbench, ແລະອຸປະກອນເສີມອື່ນໆ.
A. ສະຖານີທົດສອບ Calibration
ອີງຕາມເງື່ອນໄຂຂອງເວັບໄຊຂອງຜູ້ໃຊ້, ສະຖານີທົດສອບການສອບທຽບຄົງທີ່ຫຼາຍໄດ້ຖືກອອກແບບສົມເຫດສົມຜົນ, ຈັດລຽງຕາມຂ້າງ. ເສັ້ນຜ່າສູນກາງສະຖານີມາດຕະຖານ: DN25, DN50, DN80, DN100, DN150, DN200, DN300, DN400, DN500, DN600. ຂະຫນາດອື່ນໆສາມາດປັບໄດ້ໂດຍການປ່ຽນທໍ່.
B. ພາກສ່ວນທໍ່ຊື່
ການປັບທຽບພາກສ່ວນທໍ່ຊື່ທີ່ຖືກອອກແບບເປັນ 20D ເທິງນ້ໍາແລະ 5D ລຸ່ມຂອງ MUT. ພາກສ່ວນເທິງ / ລຸ່ມນ້ໍາມີຈຸດແຕະຄວາມກົດດັນ / ອຸນຫະພູມຕອບສະຫນອງຄວາມຕ້ອງການກົດລະບຽບທີ່ກ່ຽວຂ້ອງ, ຜະນຶກເຂົ້າກັນໄດ້, ອໍານວຍຄວາມສະດວກໃນການປັບ MUT.
ວັດສະດຸ: ທໍ່ສະແຕນເລດ 304. ເສັ້ນຜ່າກາງນອກແລະຄວາມຫນາຂອງກໍາແພງ deviations ປະຕິບັດຕາມມາດຕະຖານແຫ່ງຊາດ.
C. Spools
ສະຖານທີ່ດັ່ງກ່າວແມ່ນມີອຸປະກອນທີ່ມີ spools ຂອງຂະຫນາດການປັບຂະຫນາດຕ່າງໆເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂະຫນາດ MUT ທີ່ແຕກຕ່າງກັນ. ຂະຫນາດຂອງສະປູນເຮັດໄດ້ຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້. ວັດສະດຸ: ສະແຕນເລດ 304.
D. Meter Clamping Device (Extension Joint)
ອຸປະກອນຍຶດຖືເປັນອຸປະກອນເສີມທີ່ສໍາຄັນ. ສິ່ງອໍານວຍຄວາມສະດວກນີ້ໃຊ້ອຸປະກອນການຍຶດໄດສອງກະບອກສູບພາຍນອກທີ່ຂັບເຄື່ອນດ້ວຍລົມທີ່ມີຟັງຊັນຄວບຄຸມດ້ວຍຄູ່ມື. ໂຄງປະກອບການນີ້ເອົາຊະນະຂໍ້ເສຍຂອງການຮົ່ວໄຫລຂອງອາກາດ / ນ້ໍາພາຍໃນທີ່ບໍ່ສາມາດກວດພົບໃນຮ່າງກາຍກະບອກ. ຄວາມຍາວຂອງເສັ້ນເລືອດຕັນໃນຮອງຮັບເຄື່ອງມືຕ່າງໆໃນຂະນະທີ່ຮັບປະກັນການປະຕິບັດ. ເສັ້ນຜ່າສູນກາງແລະປະລິມານໄດ້ຖືກອອກແບບສົມເຫດສົມຜົນຕໍ່ສະຖານີສໍາລັບການຖື MUT.
ຄວາມກົດດັນ nominal: 1.6MPa, ມາດຕະຖານ stroke ≥200mm, ຄວາມກົດດັນອາກາດ (0.4 ~ 0.6) MPa, ວັດສະດຸຕິດຕໍ່ກັບຂະຫນາດກາງ: 304 ສະແຕນເລດ.
E. ເຄື່ອງສົ່ງສັນຍານ
ກ. ເຄື່ອງສົ່ງຄວາມກົດດັນ: ລະດັບຄວາມຖືກຕ້ອງ 0.075, MPE ± 0.075%FS, ຊ່ວງ (0 ~ 1.0) MPa, ຜົນຜະລິດ (4 ~ 20) mA, ພະລັງງານ DC24V. ໂດຍປົກກະຕິ 3 ຫນ່ວຍຕິດຕັ້ງຢູ່ໃນ manifolds, ຫຼືໂດຍຜູ້ໃຊ້ສະເພາະຕໍ່ທໍ່.
ຂ. ເຄື່ອງສົ່ງສັນຍານອຸນຫະພູມ: ລະດັບຄວາມຖືກຕ້ອງ 0.2, MPE ±0.2°C, ໄລຍະ (0~50)°C, ຜົນຜະລິດ (4~20)mA, ພະລັງງານ DC24V. ໂດຍປົກກະຕິ 3 ຫນ່ວຍຕິດຕັ້ງຢູ່ໃນ manifolds, ຫຼືໂດຍຜູ້ໃຊ້ສະເພາະຕໍ່ທໍ່.
F. ວາວ
ກ. ປ່ຽງປິດນິວເມຕິກ
ປ່ຽງປິດທໍ່ໃຊ້ປ່ຽງລູກປືນແບບເຕັມຮູບແບບ O-type pneumatic ແລະວາວ butterfly pneumatic. ຂັບເຄື່ອນດ້ວຍອາກາດອັດແໜ້ນເພື່ອເປີດ/ປິດທໍ່ໄດ້ໄວ. Ball valve nominal pressure 1.6MPa; Butterfly valve nominal pressure 1.0MPa. ຕາມຄວາມຕ້ອງການການປັບທຽບ, ຫນຶ່ງວາວບານ pneumatic ໄດ້ຖືກຕັ້ງຂຶ້ນນ້ໍາຂອງເຄື່ອງວັດແທກການໄຫຼມາດຕະຖານ, ນ້ໍາຂອງ diverter, ແລະນ້ໍາ / ລຸ່ມຂອງ MUT ໃນແຕ່ລະສະຖານີການທົດສອບ. ຫນຶ່ງວາວຜີເສື້ອ pneumatic ແມ່ນຖືກຕັ້ງຢູ່ໃນທໍ່ລະບາຍນ້ໍາຂອງແຕ່ລະຖັງນໍ້າຫນັກ. ວັດສະດຸຫຼັກວາວ: ສະແຕນເລດ 304 ຫຼືສະແຕນເລດເຕັມ.
ຂ. ກະແສໄຟຟ້າຄວບຄຸມວາວບານ
ຕິດຕາມກວດກາແມ່ບົດວັດແທກການໄຫຼທັນທີເພື່ອປັບຄວາມຖີ່ VFD ແລະການເປີດວາວ, ບັນລຸອັດຕາການໄຫຼທີ່ຕ້ອງການ. ໃຊ້ໄຟຟ້າ V-port regulating ball valves, ຄວາມຖືກຕ້ອງ 1%, ຄວາມກົດດັນ nominal 1.6MPa. ການຕິດຕັ້ງທໍ່ສົ່ງແມ່ບົດຫນຶ່ງຂອງແຕ່ລະທໍ່ແມ່ບົດ. ວັດສະດຸຫຼັກວາວ: ສະແຕນເລດ 304 ຫຼືສະແຕນເລດເຕັມ.
ຄ. ວາວຄູ່ມື & ກວດສອບວາວ
ປ່ຽງປະຕູຄູ່ມືຕິດຕັ້ງຢູ່ທາງເທິງຂອງແຕ່ລະພອດດູດປັ໊ມສໍາລັບການໂດດດ່ຽວໃນລະຫວ່າງການບໍາລຸງຮັກສາ. ກວດເບິ່ງວາວທີ່ຕິດຕັ້ງລົງລຸ່ມຂອງແຕ່ລະປອດປ່ອຍປ່ຽງເພື່ອປົກປ້ອງປັ໊ມຈາກຄ້ອນນ້ໍາໃນລະຫວ່າງການເຮັດວຽກປົກກະຕິ. ວັດສະດຸຫຼັກຂອງປ່ຽງປະຕູ: 304 ຫຼືສະແຕນເລດເຕັມ. ກວດສອບວັດສະດຸວາວ: ສະແຕນເລດ 304 ເຕັມ.
ງ. ວາວຄູ່ມື
ປ່ຽງລະບາຍອາກາດ, ປ່ຽງລະບາຍອາກາດ, ແລະປ່ຽງຄວບຄຸມກົນໄກການລ້າງແມ່ນຕັ້ງຢູ່ໃນແຕ່ລະທໍ່ລະບົບ. ການຄວບຄຸມດ້ວຍມື. ວັດສະດຸ: ສະແຕນເລດ 304.
e. ໂຄງຮ່າງການສອບເສັງ Calibration
ໂຄງຮ່າງການຍົກແບບເຄື່ອນທີ່ສໍາລັບການຂົນສົ່ງ, ສະຖຽນລະພາບ, ສະຫນັບສະຫນູນ, ແລະການຕິດຕັ້ງ MUTs. ຂໍ້ມູນຈໍາເພາະແລະປະລິມານທີ່ກໍານົດໄວ້ຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້. ຂາຕັ້ງມີກົນໄກສູນກາງຮັບປະກັນຄວາມເຂັ້ມຂອງທໍ່ແລະການໂຍກຍ້າຍ MUT ໄດ້ງ່າຍ. ພື້ນທີ່ຕິດຕັ້ງຖືກອອກແບບມາເພື່ອຮອງຮັບແມັດຂະຫນາດພິເສດຕ່າງໆ.
f. ສະຫນັບສະຫນູນທໍ່
ທໍ່ທໍ່ທີ່ສອດຄ້ອງກັນແມ່ນສະຫນັບສະຫນູນສໍາລັບທໍ່ຂະບວນການທັງຫມົດ. ການຊ່ວຍເຫຼືອທີ່ອຸທິດຕົນໃຫ້ສໍາລັບຜູ້ປ່ຽນເສັ້ນທາງແຕ່ລະຄົນ. ວັດສະດຸ: ເຫຼັກກາກບອນ painted.
2.4.4ລະບົບແຫຼ່ງອາກາດພະລັງງານ
ສະຫນອງອາກາດບີບອັດສໍາລັບອົງປະກອບ pneumatic ໃນສະຖານທີ່, ຕອບສະຫນອງຄວາມຕ້ອງການການນໍາໃຊ້ປົກກະຕິ. ອົງປະກອບຂອງເຄື່ອງສູບອາກາດໃຊ້ຍີ່ຫໍ້ຊັ້ນຫນຶ່ງສໍາລັບຄວາມປອດໄພ, ຄວາມຫນ້າເຊື່ອຖື, ແລະປະສິດທິພາບທີ່ຫມັ້ນຄົງ.
A. ເຄື່ອງອັດອາກາດ
ເຄື່ອງອັດອາກາດປະເພດລູກສູບເລືອກໂດຍອີງໃສ່ຄວາມຕ້ອງການຕົວຈິງ. ຂໍ້ດີ: ຄວາມຫນ້າເຊື່ອຖືສູງ, ການດໍາເນີນງານງ່າຍ / ການບໍາລຸງຮັກສາ, ການດຸ່ນດ່ຽງການເຄື່ອນໄຫວທີ່ດີ, ການປັບຕົວທີ່ເຂັ້ມແຂງ, ທີ່ເຫມາະສົມກັບສະພາບການເຮັດວຽກຕ່າງໆ.
B. ຖັງຮັບອາກາດ
ປະລິມານທີ່ຖືກອອກແບບຢ່າງສົມເຫດສົມຜົນແລະຄວາມກົດດັນສູງສຸດໂດຍອີງໃສ່ຈໍານວນຂອງອຸປະກອນ pneumatic ແລະຄວາມກົດດັນການເຮັດວຽກຂອງເຂົາເຈົ້າ. ວັດສະດຸ: ເຫຼັກກາກບອນ painted. ມີເຄື່ອງວັດແທກຄວາມກົດດັນ, ປ່ຽງຄວາມປອດໄພຍົກເຕັມພາກຮຽນ spring, ປ່ຽງລະບາຍອາກາດ, ປ່ຽງລະບາຍນ້ໍາ, ທໍ່, ແລະອຸປະກອນເສີມ.
ການອອກແບບແລະການຜະລິດປະຕິບັດຕາມ GB150-2011 "Steel Pressure Vessels" ແລະ "Pressure Vessel Safety Technology Supervision Regulation". ເອກະສານຄວາມປອດໄພໃຫ້ຄົບຖ້ວນ.
2.4.5ພາກສ່ວນມາດຕະຖານ
ພາກສ່ວນມາດຕະຖານ (ຂໍ້ສອກ, ຕົວຫຼຸດຜ່ອນ, flanges, fasteners, gaskets, ແລະອື່ນໆ) ມີຄວາມກົດດັນ nominal ≥1.0MPa. ວັດສະດຸ: ສະແຕນເລດ.
2.4.6ພາກສ່ວນທໍ່
ພາກສ່ວນທໍ່ໃຊ້ທໍ່ສະແຕນເລດ (304), ຄວາມກົດດັນ nominal ≥1.0MPa. ທໍ່ປະຕິບັດຕາມມາດຕະຖານແຫ່ງຊາດທີ່ກ່ຽວຂ້ອງ. ຄວາມຍາວພາກປະຕິບັດ, ປະລິມານ, ແລະຮູບແບບການຕິດຕັ້ງໄດ້ກໍານົດຢ່າງສົມເຫດສົມຜົນໂດຍອີງໃສ່ຮູບແບບສະຖານທີ່ຕົວຈິງ.

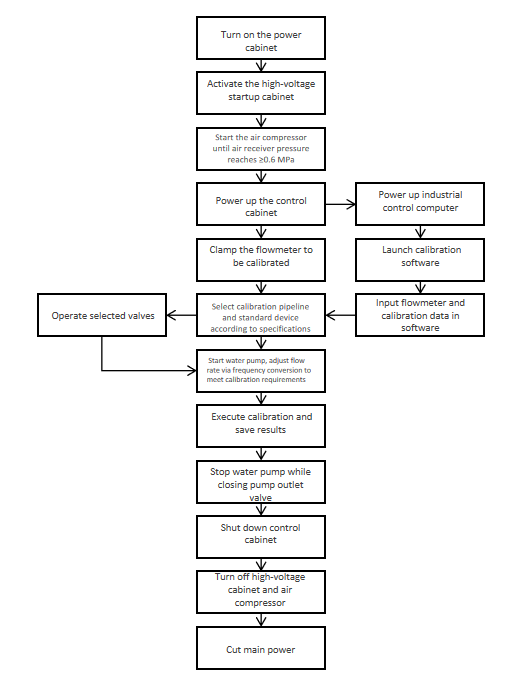
2.5 ຂັ້ນຕອນການເຮັດວຽກ Calibration
2.5.1ເປີດຕູ້ໄຟຟ້າ, ຕູ້ເລີ່ມຕົ້ນ VFD, ເຄື່ອງອັດອາກາດ, ຕູ້ຄວບຄຸມ, ຄອມພິວເຕີອຸດສາຫະກໍາ (IPC), ແລະອື່ນໆ, ຕາມລໍາດັບ. ຢືນຢັນການເລີ່ມຕົ້ນອຸປະກອນແລະການເຮັດວຽກປົກກະຕິ.
2.5.2ທໍາອິດ, ເລືອກເສັ້ນຜ່າສູນກາງທໍ່ການປັບທຽບກັບເສັ້ນຜ່າສູນກາງ MUT (calibrate ແມັດເສັ້ນຜ່າສູນກາງທີ່ແຕກຕ່າງກັນໂດຍການປ່ຽນທໍ່). ວາງ MUT ຢູ່ເທິງຖາດບ່ອນເຮັດວຽກ ຫຼື ຂາຕັ້ງ V ຂອງສະຖານີທົດສອບການປັບຕົວ. ປັບກົນໄກການຍົກໄຮໂດຼລິກຂອງບ່ອນເຮັດວຽກເພື່ອຈັດວາງລະດັບຄວາມສູງຂອງສູນກາງແລະຄວາມເຂັ້ມຂຸ້ນຂອງ MUT ກັບທໍ່ນ້ໍາເທິງແລະອຸປະກອນຂະຫຍາຍ pneumatic (clamping). ຫຼັງຈາກນັ້ນ, lock ກົນໄກໄຮໂດຼລິກ.
2.5.3ຫຼັງຈາກການຕິດຕັ້ງ MUT, ເປີດໃຊ້ອຸປະກອນຍຶດທໍ່ນິວເມຕິກໂດຍໃຊ້ປ່ຽງທິດທາງຄູ່ມືເພື່ອຍຶດ MUT ຕາມແກນ. ສຸດທ້າຍ, ຮັບປະກັນການເຊື່ອມຕໍ່ MUT flange ກັບ flanges pipeline ໂດຍໃຊ້ bolts ທີ່ກົງກັນ, ຮັບປະກັນການປະທັບຕາທີ່ບໍ່ມີການຮົ່ວໄຫຼ. ນີ້ເຮັດສໍາເລັດການຕິດຕັ້ງ MUT. ກັບຄືນຂະບວນການສໍາລັບການໂຍກຍ້າຍ (ຫມາຍເຫດ: ກ່ອນທີ່ຈະເອົາອອກ, ເປີດປ່ຽງທໍ່ລະບາຍນ້ໍາເພື່ອ depressurize ແລະລະບາຍ; ພຽງແຕ່ເອົາ MUT ຫຼັງຈາກຂະຫນາດກາງແມ່ນ drained).
2.5.4ເລີ່ມປັ໊ມທີ່ສອດຄ້ອງກັບໄລຍະການໄຫຼ (ຄວບຄຸມ VFD; ປັບຄວາມຖີ່ / ຄວາມໄວຂອງປັ໊ມໃນລະຫວ່າງການໄຫຼວຽນເພື່ອເຮັດໃຫ້ການໄຫຼຂອງທໍ່ຢູ່ໃນຂອບເຂດທີ່ສາມາດກວດພົບໄດ້). ຄ່ອຍໆເປີດປ່ຽງທໍ່ທີ່ເລືອກ. ຄວບຄຸມການໄຫຼຜ່ານປ່ຽງຄວບຄຸມຈົນກ່ວາການໄຫຼທີ່ຫມັ້ນຄົງຢູ່ທີ່ຈຸດທົດສອບແມ່ນບັນລຸໄດ້. ໃນຂັ້ນຕອນນີ້, ຕົວແຍກ, ປ່ຽງລະບາຍນໍ້າຂອງຖັງນໍ້າໜັກ, ແລະປ່ຽງສາຍສົ່ງຄືນແມ່ນຢູ່ໃນທ່າລະບາຍ. ໃນເວລາດຽວກັນ, ກວດເບິ່ງວ່າອຸປະກອນກໍາລັງເຮັດວຽກເປັນປົກກະຕິ. ຖ້າຜິດປົກກະຕິ, ແກ້ໄຂບັນຫາແລະການສ້ອມແປງຕາມຄູ່ມືອຸປະກອນທີ່ກ່ຽວຂ້ອງ.
2.5.5ກ່ອນທີ່ຈະປັບທຽບຢ່າງເປັນທາງການ, ໃຫ້ກວດເບິ່ງຖ້າຫາກວ່າອຸນຫະພູມ / ຄວາມກົດດັນທັງຫມົດເຄື່ອງມືແລະເກັດທີ່ເຮັດວຽກ. ວິທີການ: ກ່ອນທີ່ຈະແລ່ນອຸປະກອນ, ກວດເບິ່ງການອ່ານເຄື່ອງມືອຸນຫະພູມຄວນຈະສອດຄ່ອງຫຼືໃກ້ຊິດ; ການອ່ານເຄື່ອງມືຄວາມກົດດັນສອດຄ່ອງຫຼືໃກ້ຊິດ; ເກັດຄວນຖືກ tared ແລະສູນ.
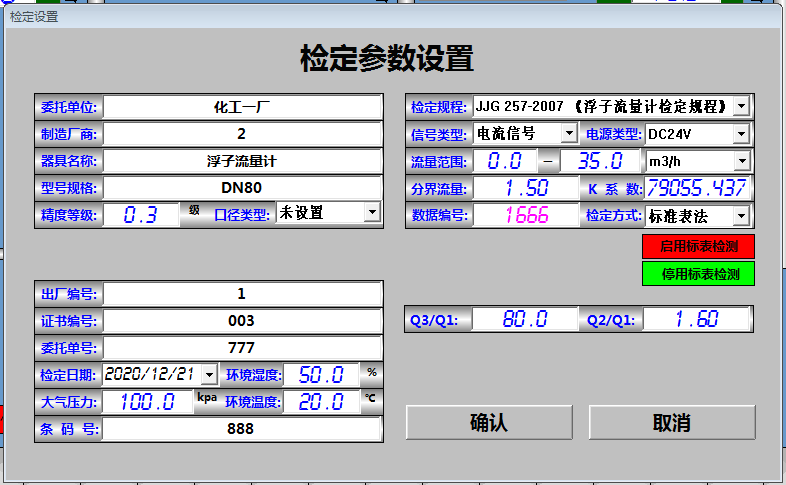
2.5.6ກໍານົດພາລາມິເຕີການປັບຕົວຢູ່ໃນການໂຕ້ຕອບຊອບແວ (ເບິ່ງຄູ່ມືຊອບແວລະບົບ). ເປີດໃຊ້ຕົວປ່ຽນທິດທາງເພື່ອປ່ຽນທິດທາງການໄຫຼໄປຫາຕຳແໜ່ງທົດສອບ. ນ້ໍາໄຫຼເຂົ້າໄປໃນຖັງຊັ່ງນໍ້າຫນັກ. ຫຼັງຈາກເຖິງເວລາປັບຕັ້ງ, ຕົວປ່ຽນຕົວປ່ຽນອັດຕະໂນມັດ. ຫຼັງຈາກນ້ໍາຄົງທີ່ໃນຖັງ, ເກັບກໍາຂໍ້ມູນຂະຫນາດ (ມາດຕະການມາດຕະຖານ). ຄອມພິວເຕີຈະບັນທຶກຂໍ້ມູນອັດຕະໂນມັດ, ຫຼັງຈາກນັ້ນເປີດປ່ຽງລະບາຍນ້ຳເພື່ອໃຫ້ກະເປົ໋າເປົ່າຫວ່າງ.
2.5.7ຫຼັງຈາກລະບາຍນ້ໍາແລະຫົດຕົວຢ່າງຫນ້ອຍ 30 ວິນາທີ, ປ່ຽງທໍ່ລະບາຍນ້ໍາຈະປິດອັດຕະໂນມັດ, ແລະຕົວປ່ຽນທິດທາງອັດຕະໂນມັດ, ເລີ່ມການແລ່ນທີສອງສໍາລັບຈຸດທົດສອບນັ້ນ. ເຮັດຊ້ໍາອີກຄັ້ງຈົນກ່ວາຈໍານວນການແລ່ນທີ່ຕ້ອງການສໍາລັບຈຸດນັ້ນສໍາເລັດ. ດໍາເນີນການເທື່ອລະຂັ້ນເພື່ອເຮັດສໍາເລັດທຸກຈຸດໄຫຼ.
2.5.8ຫຼັງຈາກການປັບຕົວ, ປິດປັ໊ມ, ປ່ຽງທີ່ກ່ຽວຂ້ອງ, ຕູ້ເລີ່ມຕົ້ນ VFD, ເຄື່ອງອັດອາກາດ, ຕູ້ພະລັງງານ, ຕູ້ຄວບຄຸມ, ແລະ IPC ຕາມລໍາດັບ.
2.5.9ຕາຕະລາງການດໍາເນີນງານ
2.6 ລະບົບການວັດແທກ ແລະ ຄວບຄຸມຄອມພິວເຕີ
2.6.1ຟັງຊັນຂອງລະບົບ
ລະບົບການວັດແທກ ແລະການຄວບຄຸມໃຊ້ຄອມພິວເຕີເປັນໜ່ວຍຄວບຄຸມສູນກາງໃນການປະມວນຜົນຂໍ້ມູນ. ການສົມທົບຮາດແວແລະຊອຟແວ, ມັນອັດຕະໂນມັດໄດ້ມາແລະຂະບວນການຂໍ້ມູນການວັດແທກ (ອຸນຫະພູມ, ເຄື່ອງສົ່ງຄວາມກົດດັນ, ມາດຕະຖານການໄຫຼຂອງແມັດ, ການໄຫຼ MUT, ເກັດ); ອັດຕະໂນມັດຄວບຄຸມປັ໊ມ, ປ່ຽງປິດ, ປ່ຽງຄວບຄຸມ, VFDs, ແລະອົງປະກອບລະບົບການຊັ່ງນໍ້າຫນັກ (diverter, valve drain); ຄວບຄຸມຄວາມກົດດັນ, ອຸນຫະພູມ, ແລະການໄຫຼ; ຂະບວນການປ່ຽນ; ແລະການສະແດງ, ເກັບຮັກສາ, ແລະພິມຜົນການປັບທຽບ, ສໍາເລັດຂະບວນການກວດສອບ metrological.
2.6.2ອົງປະກອບຮາດແວຂອງລະບົບ
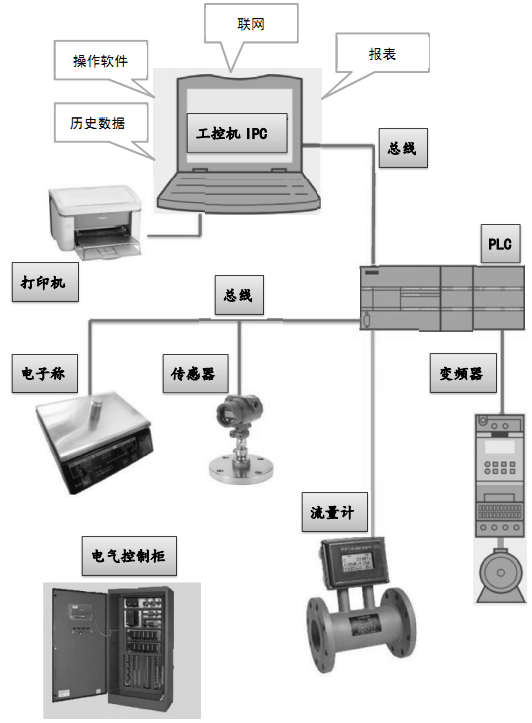
2.6.2.1 Programmable Logic Controller (PLC) & Peripherals
PLC ເຮັດຫນ້າທີ່ເປັນຕົວຄວບຄຸມລະດັບຕ່ໍາ. ຫນ້າທີ່ປະກອບມີ:
* ຂະບວນການຈັດການສັນຍານ, ການໄດ້ມາ, ການປ່ຽນເປັນຄ່າພາລາມິເຕີສຳລັບ IPC (ເວລາຕົວຢ່າງ <1ms).
* ການຄວບຄຸມຂະບວນການອັດຕະໂນມັດ, ການຄວບຄຸມການປັບອັດຕະໂນມັດ.
* ການສື່ສານເຄືອຂ່າຍ.
ໃຊ້ Siemens PLC series, I/O modules, counter modules. ຕິດຕັ້ງຢູ່ໃນຕູ້ຄວບຄຸມສະເພາະທີ່ປະຕິບັດຕາມ IEC60439, GB4942, GB50062-92. ມາພ້ອມກັບປຸ່ມສະຫຼັບ interlock ແລະຕົວຊີ້ວັດປຸກ.
ຕູ້ຍັງໃຊ້ອຸປະກອນຕໍ່ພ່ວງ (ສະວິດ, ຟິວ, ລີເລ, ຄອນແທກ) ໂດຍໃຊ້ຍີ່ຫໍ້ທີ່ມີຄຸນນະພາບພາຍໃນປະເທດ.
2.6.2.2ຈັບເວລາອ້າງອີງການປັບທຽບ
ການພັດທະນາໃນເຮືອນ, ສະແດງກໍານົດເວລາ / ການນັບໃນການໂຕ້ຕອບຂອງຄອມພິວເຕີຕົ້ນຕໍ. ການວັດແທກຄວາມຖີ່ຂະຫຍາຍຄວາມບໍ່ແນ່ນອນ *U*=3×10⁻⁶ (*k*=2); ຄວາມລະອຽດຕໍ່າສຸດ ≤0.001s. ອິນເຕີເຟດການສອບທຽບທີ່ສະຫງວນໄວ້ດ້ວຍສອງຜົນຜະລິດສໍາລັບການປັບຕົວຈັບເວລາອອນໄລນ໌ໂດຍໃຊ້ຄວາມຖີ່ມາດຕະຖານ.
ຂໍ້ມູນສະເພາະທາງດ້ານວິຊາການ:
| ບໍ່. | ລາຍການ | ພາລາມິເຕີ | ໝາຍເຫດ |
| 1 | Crystal Oscillator 8h ຄວາມຫມັ້ນຄົງ | ≤1×10⁻⁶ |
|
| 2 | ຄວາມຖີ່ ມາດຕະການ. ຂະຫຍາຍຄວາມບໍ່ແນ່ນອນ | U=3×10⁻⁶ (*k*=2) |
|
| 3 | Timer ຄວາມລະອຽດຕໍາ່ສຸດທີ່ | 0.001ວິ |
|
2.6.2.3ລະບົບຄວບຄຸມຄວາມຖີ່ຂອງຕົວປ່ຽນແປງ (VFD) ແລະລະບົບຄວບຄຸມ
ໃຊ້ລະບົບ VFD ເພື່ອຄວບຄຸມຄວາມໄວຂອງປັ໊ມສໍາລັບການຄວບຄຸມການໄຫຼ. VFDs ແມ່ນອົງປະກອບຫຼັກ, ຕິດຕັ້ງຢູ່ໃນຕູ້ເລີ່ມຕົ້ນ VFD ໂດຍໃຊ້ແບບຟອມ GGD enclosure, ປະຕິບັດຕາມ IEC60439, GB4942, GB50062-92.
ລະບົບ VFD ມີຫນ້າທີ່ຢຸດທ້ອງຖິ່ນ / ສຸກເສີນ. ການເລີ່ມຕົ້ນ / ຢຸດປົກກະຕິສາມາດເປັນຄູ່ມື (ທ້ອງຖິ່ນ) ຫຼືການຄວບຄຸມໄລຍະໄກຄອມພິວເຕີ.
2.6.2.4ໜ່ວຍງານຄວບຄຸມສູນກາງ
ຍີ່ຫໍ້ Advantech Industrial PC (IPC). ການຕັ້ງຄ່າຕົ້ນຕໍ:
| ບໍ່. | ການຕັ້ງຄ່າຮາດແວ | ພາລາມິເຕີ | ໝາຍເຫດ |
| 1 | ເມນບອດ | Advantech |
|
| 2 | CPU | I5 |
|
| 3 | ຄວາມຊົງຈໍາ | 8G |
|
| 4 | ຮາດດິດ | 1TB + 120G SSD |
|
| 5 | ຕິດຕາມກວດກາ | 24" ສີ LCD |
|
IPC ແມ່ນຫຼັກ. ການນໍາໃຊ້ "ການວັດແທກການໄຫຼແລະຊອບແວການຄວບຄຸມ", ມັນໄດ້ຮັບຂໍ້ມູນພາກສະຫນາມຈາກ PLC, ການຄວບຄຸມຜົນຜະລິດຂອງລະບົບ, ແນະນໍາຂະບວນການການສອບທຽບ, ຈັດການກິດຈະກໍາ, ຂະບວນການ / ການຄິດໄລ່ຂໍ້ມູນການສອບທຽບ, ນໍາສະເຫນີ / ເກັບຮັກສາການບັນທຶກ / ບົດລາຍງານ, ແລະອະນຸຍາດໃຫ້ການສອບຖາມຂໍ້ມູນປະຫວັດສາດ / ການສໍາຮອງຂໍ້ມູນ.
ຈໍສະແດງຜົນ IPC, ເມົ້າ, ແລະແປ້ນພິມເຮັດໜ້າທີ່ເປັນການໂຕ້ຕອບຂອງມະນຸດ-ເຄື່ອງ (HMI).
2.6.2.5ອຸປະກອນອອກ
ເຄື່ອງພິມເລເຊີ A4 ໜ່ວຍໜຶ່ງ.
2.6.3ລະບົບຊອບແວ
ປະກອບດ້ວຍ "ຊອບແວການວັດແທກແລະຄວບຄຸມການໄຫຼເຂົ້າ", "ຊອບແວການປະມວນຜົນຂໍ້ມູນການຄິດໄລ່", "ໂຄງການປະມວນຜົນຂໍ້ມູນການສື່ສານ" ແລ່ນຢູ່ໃນ IPC; ແລະ "ໂຄງການຄວບຄຸມ PLC" ແລ່ນຢູ່ໃນ PLC.
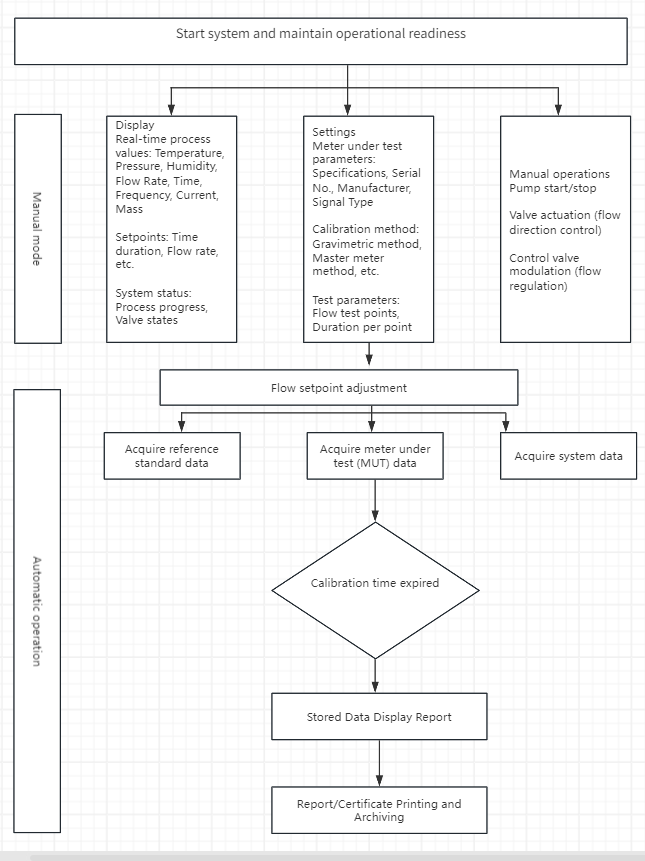
2.6.3.1ຕາຕະລາງການເຮັດວຽກຂອງຊອບແວ
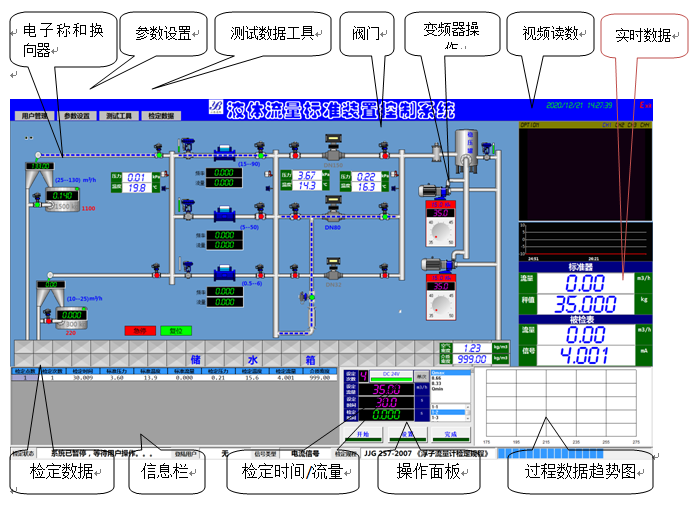
2.6.3.2ຫນ້າຈໍການດໍາເນີນງານຊອບແວຕົ້ນຕໍ
2.6.3.3ຟັງຊັນຊອບແວພື້ນຖານ
ຂະບວນການສະແດງແລະການດໍາເນີນງານ: ແຜນວາດແຜນວາດຂະບວນການແບບໄດນາມິກສະແດງສະຖານະການໄຫຼຂອງການທົດສອບ. ສະແດງສະຖານະພາລາມິເຕີທາງວິສະວະກໍາໃນເວລາຈິງ. ການດໍາເນີນງານປະຕິບັດຕາມມາດຕະຖານແຫ່ງຊາດ, ລະບຽບການ, ແລະຂັ້ນຕອນ; ການຄວບຄຸມທີ່ຖືກຕ້ອງແລະເຊື່ອຖືໄດ້.
ການສະແດງສະຖານະ: ສະແດງຕົວກໍານົດການພາກສະຫນາມການໄຫຼຂອງທໍ່ (ອຸນຫະພູມ, ຄວາມກົດດັນ, ຄວາມໄວ, ການໄຫຼ, ແລະອື່ນໆ) ແລະສະຖານະພາບອຸປະກອນໃນການເບິ່ງແຜນການ.
ຜູ້ຈັດການລາຍງານ ແລະຂໍ້ມູນປະຫວັດສາດt: ສ້າງການປ່ຽນແປງ, ປະຈໍາວັນ, ເດືອນ, ບົດລາຍງານປະຈໍາປີສໍາລັບພາລາມິເຕີທີ່ສໍາຄັນແລະສະຖານະການອຸປະກອນ. ບົດລາຍງານສາມາດພິມອັດຕະໂນມັດຫຼືພິມດ້ວຍຕົນເອງ.
ການຈັດການຂໍ້ຄວາມ: ສະແດງຂໍ້ມູນຄວາມຜິດຜ່ານການປ່ຽນແປງສີ, ປັອບອັບ, ຕາຕະລາງ. ກໍານົດພາລາມິເຕີຈໍາກັດສັນຍານເຕືອນໄພແລະອຸປະກອນເຕືອນຄວາມຜິດ.
ການຄຸ້ມຄອງຜູ້ໃຊ້/ຄວາມປອດໄພ: ສະຫນອງການເຂົ້າເຖິງຫຼາຍລະດັບທີ່ມີບູລິມະສິດການດໍາເນີນງານທີ່ແຕກຕ່າງກັນ. ລະດັບລະຫັດຜ່ານທີ່ຕ້ອງການສໍາລັບອຸປະກອນພາກສະຫນາມເລີ່ມຕົ້ນ / ຢຸດແລະການຕັ້ງຄ່າພາລາມິເຕີເພື່ອປ້ອງກັນການເຮັດວຽກທີ່ຜິດພາດ.
ການຄຸ້ມຄອງລະບົບ: ສ້າງ/ຮັກສາຂໍ້ມູນຜູ້ໃຊ້. ການຄຸ້ມຄອງຜູ້ໃຊ້, ການເຂົ້າສູ່ລະບົບ / ປະຫວັດສາດການດໍາເນີນງານສໍາລັບການສອບຖາມແລະຄວາມປອດໄພ.
ບັນທຶກ & ສຳຮອງຂໍ້ມູນ: ຄວາມສາມາດໃນການບັນທຶກແລະສໍາຮອງຂໍ້ມູນການທົດສອບແລະໄຟລ໌ທີ່ກ່ຽວຂ້ອງ.
A. ຫນ້າທີ່ຄວບຄຸມ
* ການຄວບຄຸມອັດຕະໂນມັດຂອງຂະບວນການ calibration.
* ການເລີ່ມຕົ້ນ / ຢຸດ Pump ແລະການຄວບຄຸມຄວາມຖີ່.
* ການຄວບຄຸມວາວ.
* ການຄວບຄຸມການສະຫຼັບ Diverter.
* ການປ້ອງກັນຂອບເຂດຈໍາກັດພາຊະນະ.
* ລະບຽບການການໄຫຼ: ອັດຕະໂນມັດຄວບຄຸມການເປີດປ່ຽງໂດຍອີງໃສ່ການໄຫຼຂອງຈຸດທົດສອບ.
B. ຟັງຊັນການເກັບຂໍ້ມູນ
* ສັນຍານອະນາລັອກໄດ້ມາໂດຍຜ່ານໂມດູນຄວາມລະອຽດສູງ 16-bit.
* ສັນຍານການຄວບຄຸມທີ່ຈັດການໂດຍໂມດູນໂປເຊດເຊີ Boolean ຄວາມໄວສູງ (CPU ເອກະລາດ, ວົງຈອນ <1us) ສໍາລັບການລວບລວມຂໍ້ມູນ synchronous.
* ອຸນຫະພູມ, ຄວາມກົດດັນການວັດແທກຂໍ້ມູນ.
* ມາດຕະຖານ flow meter ການວັດແທກຂໍ້ມູນ.
* ການວັດແທກຂໍ້ມູນການໄຫຼ MUT (4-20mA, ກໍາມະຈອນ, ແລະອື່ນໆ).
* ການວັດແທກຂໍ້ມູນການຊັ່ງນໍ້າຫນັກ.
* ຕໍາແຫນ່ງ Valve ຄໍາຄຶດຄໍາເຫັນສັນຍານ.
C. ຟັງຊັນການປະມວນຜົນຂໍ້ມູນ
* ປະຕິບັດການສອບທຽບຂໍ້ມູນແລະຜົນການຕັດສິນຕາມມາດຕະຖານລະດັບຊາດ, ລະບຽບການ.
* ອະນຸຍາດໃຫ້ການຕັ້ງຄ່າ segmented ຂອງສໍາປະສິດວັດການໄຫຼມາດຕະຖານທັນທີທັນໃດ.
* ການຕັ້ງຄ່າການປັບປ່ຽນຂອງຈຸດທົດສອບ, ຈໍານວນຂອງການແລ່ນ, ເວລາແລ່ນ (ອັດຕະໂນມັດຕໍ່ມາດຕະຖານຫຼືຜູ້ໃຊ້ກໍານົດ).
* ເກັບຮັກສາບັນທຶກການທົດສອບໃນຖານຂໍ້ມູນສໍາລັບການສອບຖາມ, ພິມ, ປັບປຸງແກ້ໄຂ, ລຶບຕາມຄວາມຕ້ອງການ.
* ອັດຕະໂນມັດສ້າງລາຍງານຂໍ້ມູນແລະຈັດການຂໍ້ມູນ.
D. ຫນ້າທີ່ສະແດງຜົນ
ການສະແດງຂະບວນການກາຟິກສໍາລັບການກວດສອບອຸປະກອນໃນເວລາທີ່ແທ້ຈິງ. ຈໍາລອງສະຖານະວາວພາກສະຫນາມ, ຄວບຄຸມການເປີດປ່ຽງ, ສະຖານະສັນຍານ MUT, ສະພາບການໄຫຼ, ອຸນຫະພູມ, ທິດທາງຕົວແຍກ, ສະຖານະປ່ຽງລະບາຍນ້ໍາ, ຄວາມຖີ່ VFD, ແລະອື່ນໆ.
E. ຫນ້າທີ່ປະຕິບັດງານ
ການໂຕ້ຕອບຜູ້ເປັນມິດກັບການດໍາເນີນງານຮູບພາບ. ການຄວບຄຸມ actuators ພາກສະຫນາມໂດຍການຄລິກຫນູ, intuitive ແລະສະດວກ.
F. ຟັງຊັນຂອງຄວາມຍາວປາ
ການໂຕ້ຕອບຂອງຄວາມຍາວປານໍາພາຜູ້ໃຊ້ຜ່ານຂະບວນການປັບຕົວທັງຫມົດ. ກໍານົດພາລາມິເຕີທີ່ຈໍາເປັນ / ຂໍ້ມູນ MUT ຕໍ່ການເຕືອນ. ການດໍາເນີນງານງ່າຍດາຍສໍາເລັດການປັບຫຼັງຈາກການຕິດຕັ້ງ. ງ່າຍ, ການຄວບຄຸມໄວ; ງ່າຍທີ່ຈະຮຽນຮູ້.
2.6.3.4ການປະຕິບັດສະເພາະຂອງຫນ້າທີ່ທີ່ສໍາຄັນ
A. MUT ການຈັດການ
ລະບົບສາມາດສະຫນອງການສະຫນອງພະລັງງານ MUT. ສັນຍານ MUT ຖືກອ່ານໂດຍໂມດູນ PLC ເຊິ່ງຄິດໄລ່ການໄຫຼສະສົມໂດຍອັດຕະໂນມັດ. ການປ່ຽນແປງຂະຫນາດໃຫຍ່ / ປະລິມານ, ການແກ້ໄຂ buoyancy ການອ່ານຂະຫນາດ, ການແກ້ໄຂອຸນຫະພູມ / ຄວາມກົດດັນ, ການປຸງແຕ່ງຂໍ້ມູນທີ່ຈໍາເປັນ, ແລະການລາຍງານແມ່ນການຈັດການອັດຕະໂນມັດໂດຍຊອບແວ IPC.
ດັ່ງທີ່ສະແດງຢູ່ຂ້າງລຸ່ມນີ້, ການໂຕ້ຕອບຂອງຊອບແວຮຽກຮ້ອງໃຫ້ມີການປ້ອນຂໍ້ມູນຄູ່ມືຂອງຕົວກໍານົດການ MUT (ເຊັ່ນ: ປະເພດສັນຍານຜ່ານເມນູເລື່ອນລົງ: ປະຈຸບັນ analog, pulse, ບໍ່ມີຜົນຜະລິດ). ຫຼັງຈາກການຄັດເລືອກ, ລະບົບຈະສົ່ງສັນຍານໄປຫາຊ່ອງທາງທີ່ຖືກຕ້ອງໂດຍອັດຕະໂນມັດ.
B. Master Meter Handling
Master meter ພະລັງງານສະຫນອງໂດຍລະບົບ. ຂໍ້ມູນທີ່ໄດ້ມາໂດຍຜ່ານການອ່ານກໍາມະຈອນ. ຊອບແວກໍານົດທໍ່ການປັບຕົວເພື່ອເລືອກເຄື່ອງວັດແທກແມ່ແບບທີ່ກ່ຽວຂ້ອງ. ໃນລະຫວ່າງການປັບ, PLC ອັດຕະໂນມັດສະສົມກໍາມະຈອນທັງຫມົດເພື່ອຮັບປະກັນຄວາມຜິດພາດຂອງການໄດ້ມາ ≤ ±1 ກໍາມະຈອນ. ແມັດແມ່ບົດສາມາດຖືກປັບຕົວເປັນແຕ່ລະໄລຍະຜ່ານທາງອອນໄລນ໌ໂດຍໃຊ້ຂະໜາດເອເລັກໂຕຣນິກ.
C. Temperature & Pressure Acquisition
ອຸນຫະພູມທັງຫມົດ / transmitter ຂັບເຄື່ອນໂດຍລະບົບ. ຄວາມແມ່ນຍໍາການແປງສູງທີ່ຕ້ອງການສໍາລັບການແກ້ໄຂ. ໃຊ້ໂມດູນ A/D 16-bit ທີ່ມີຄວາມຖືກຕ້ອງສູງ, ຄວາມໄວ, ການກັ່ນຕອງດິຈິຕອນ, ແລະການຊົດເຊີຍ.
D. ປິດວາວ & ການຄວບຄຸມ Diverter
ພະລັງງານຍັງສະຫນອງໂດຍລະບົບ. ສາມາດຄວບຄຸມໂດຍການຄລິກຮູບພາບຫນ້າຈໍ / ປຸ່ມຫຼືອັດຕະໂນມັດຕໍ່ການໄຫຼຂະບວນການ. Diverter ປ່ຽນອັດຕະໂນມັດໃນລະຫວ່າງການປັບຕົວ; ຕົວຈັບເວລາສະເພາະບັນທຶກການສະຫຼັບເວລາ ແລະເວລາເດີນທາງ.
E. ການຄວບຄຸມວາວຄວບຄຸມ
ຄວບຄຸມກະແສໄຟຟ້າທີ່ສະໜອງໃຫ້ໂດຍໂມດູນ D/A. ສ່ວນຫຼາຍແມ່ນໃຊ້ສໍາລັບກົດລະບຽບການໄຫຼເຂົ້າ. ດ້ວຍຄວາມກົດດັນດ້ານເທິງຄົງທີ່, ການເປີດປ່ຽງແມ່ນເສັ້ນທີ່ຈະໄຫຼ; ການຄວບຄຸມມັນບັນລຸການໄຫຼຂອງການທົດສອບທີ່ຈໍາເປັນ.
F. Scale Data Acquisition
ພະລັງງານ AC220V ສະຫນອງໂດຍລະບົບ. ຂໍ້ມູນທີ່ໄດ້ມາໂດຍຜ່ານການສື່ສານ RS485. ຊອບແວສາມາດເລືອກອັດຕະໂນມັດລະດັບຂະຫນາດຂະຫນາດທີ່ເຫມາະສົມໂດຍອີງໃສ່ຈຸດໄຫຼ / calibration ທີ່ໃຊ້ເວລາ, ຫຼືຜູ້ປະຕິບັດການສາມາດເລືອກດ້ວຍຕົນເອງໂດຍຜ່ານການໂຕ້ຕອບ.
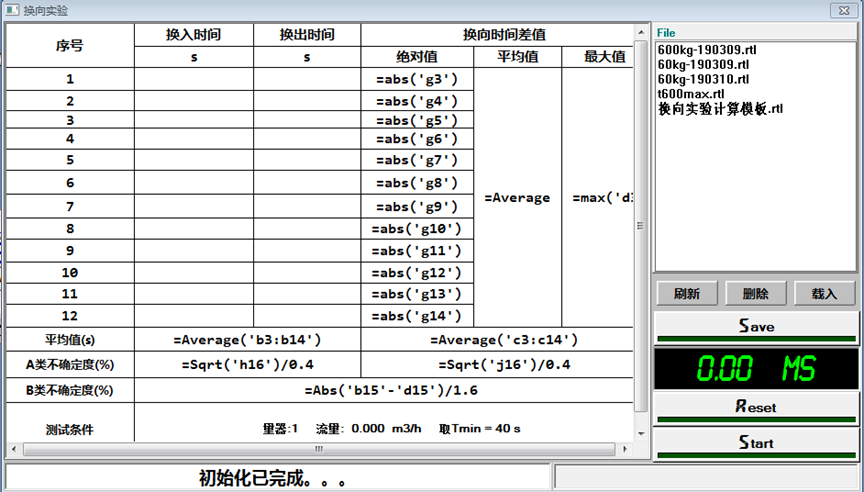
G. ແມ່ແບບການທົດສອບ Diverter
ອໍານວຍຄວາມສະດວກໃນການປັບຕົວປ່ຽນເວລາໃນຫນ້າຈໍນີ້, ອັດຕະໂນມັດສ້າງຂໍ້ມູນຕາມກົດລະບຽບ. ຂໍ້ມູນສາມາດຖືກສົ່ງອອກແລະເກັບໄວ້ໃນຖານຂໍ້ມູນ.
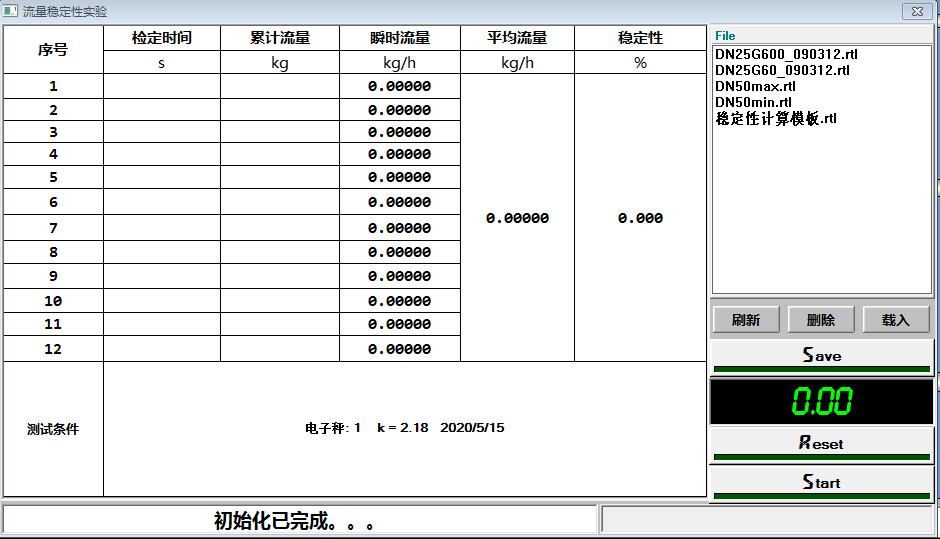
H. ແມ່ແບບການທົດສອບຄວາມຫມັ້ນຄົງ
ອຳນວຍຄວາມສະດວກການປັບຄວາມສະຖຽນຂອງການໄຫຼເຂົ້າພາຍໃນໜ້າຈໍນີ້, ສ້າງຂໍ້ມູນທີ່ສອດຄ່ອງໂດຍອັດຕະໂນມັດ. ຂໍ້ມູນສາມາດຖືກສົ່ງອອກແລະເກັບຮັກສາໄວ້.
2.6.3.5ຄວບຄຸມຊອບແວການພັດທະນາໂຄງການ
ຊອບແວຄວບຄຸມລະດັບສູງສຸດ (IPC) ພັດທະນາໂດຍໃຊ້ຊອບແວການຕັ້ງຄ່າ. ໂຄງການຄວບຄຸມລະດັບຕ່ໍາ (PLC) ປະສົມປະສານພາຍໃນຊອບແວການຕັ້ງຄ່າ. ໃຫ້ HMI, ພາບເຄື່ອນໄຫວຂອງສະຖານະລະບົບ, ການຄວບຄຸມ intuitive. ມີຄຸນສົມບັດເຂົ້າກັນໄດ້ຂອງຮາດແວທີ່ດີ ແລະຟັງຊັນທີ່ມີປະສິດທິພາບ. ພັດທະນາຢ່າງໄວວາ, ງ່າຍຕໍ່ການນໍາໃຊ້, ການໂຕ້ຕອບທີ່ເປັນມິດ.
ໂຄງການປະມວນຜົນຂໍ້ມູນ Calibration ພັດທະນາໂດຍນໍາໃຊ້ລະຫັດການຄວບຄຸມ Microsoft Office Excel VBA. ຖານຂໍ້ມູນ Microsoft SQL Server ເກັບຮັກສາຂໍ້ມູນການປັບທຽບ. ລະບົບລາຍງານທີ່ອີງໃສ່ Excel ອັດຕະໂນມັດສ້າງລາຍງານແລະຈັດການຂໍ້ມູນ.
ການສະແດງຂໍ້ມູນໃນເວລາຈິງ, ການປະມວນຜົນອັດຕະໂນມັດ, ຊ່ວຍປະຢັດຜົນໄດ້ຮັບແລະຂໍ້ມູນດິບສໍາລັບການຢັ້ງຢືນຄູ່ມືການຮັບປະກັນຄວາມຖືກຕ້ອງ. ເກັບຮັກສາບັນທຶກໃນຖານຂໍ້ມູນສໍາລັບການສອບຖາມ, ພິມ, ແກ້ໄຂ, ລຶບ.
ໂຄງການບໍລິການການສື່ສານຂໍ້ມູນພັດທະນາໂດຍນໍາໃຊ້ VB 6.0 SP6 ສໍາລັບການສື່ສານກັບເກັດແລະເຄື່ອງມືອື່ນໆ.
ການຍົກລະດັບ & ບໍາລຸງຮັກສາຊອບແວ: ເປັນມິດກັບຜູ້ໃຊ້, ຮັກສາໄດ້ສູງ. ສະຫນອງການຍົກລະດັບຕະຫຼອດຊີວິດເພື່ອປັບຕົວກັບການປ່ຽນແປງມາດຕະຖານ / ກົດລະບຽບຫຼືຄວາມຕ້ອງການຂອງຜູ້ໃຊ້.
2.7 ຂັ້ນຕອນການບຳລຸງຮັກສາ
2.7.1ການຮັກສາປ້ຳຫຼັກ
2.7.1.1ປະຕິບັດຕາມຂັ້ນຕອນການປະຕິບັດປັ໊ມຢ່າງເຂັ້ມງວດສໍາລັບການເລີ່ມຕົ້ນ, ແລ່ນ, ຢຸດ. ຮັກສາບັນທຶກການດໍາເນີນງານ.
2.7.1.2ກວດເບິ່ງນໍ້າມັນເຄື່ອງຢູ່ຈຸດທີ່ຫຼໍ່ລື່ນຕໍ່ການປ່ຽນແປງຕໍ່ກັບຂໍ້ມູນສະເພາະ. ປະຕິບັດຢ່າງເຂັ້ມງວດ.
2.7.1.3ກວດສອບອຸນຫະພູມທີ່ຮັບຜິດຊອບ: ≤ ອຸນຫະພູມລ້ອມຮອບ + 35°C; ອຸນຫະພູມລູກປືນສູງສຸດ ≤75°C; ອຸນຫະພູມທີ່ຮັບຜິດຊອບແຂນສູງສຸດ ≤70°C. ກວດເບິ່ງອຸນຫະພູມມໍເຕີເພີ່ມຂຶ້ນຕໍ່ການປ່ຽນແປງ.
2.7.1.4ກວດເບິ່ງການຮົ່ວໄຫຼຂອງປະທັບຕາ shaft ເປັນປະຈໍາ: ການຫຸ້ມຫໍ່ປະທັບຕາ ~ 10 ຢອດ / ນາທີ; ປະທັບຕາກົນຈັກ: ສູນການຮົ່ວໄຫຼ.
2.7.1.5ສັງເກດເບິ່ງຄວາມກົດດັນຂອງປັ໊ມ, ກະແສໄຟຟ້າ (ປົກກະຕິ / ຄົງທີ່) ໃນລະຫວ່າງການປະຕິບັດງານ. ຟັງສຽງລົບກວນ/ຜິດປົກກະຕິ. ແກ້ໄຂບັນຫາທັນທີ.
2.7.2ການຄວບຄຸມການບໍາລຸງຮັກສາລະບົບ
2.7.2.1ເຮັດຄວາມສະອາດຝຸ່ນປົກກະຕິຈາກຕູ້ຄວບຄຸມພຽງແຕ່ຫຼັງຈາກປິດໄຟ.
2.7.2.2ຢ່າໃຊ້ຄອມພິວເຕີສິ່ງອໍານວຍຄວາມສະດວກສໍາລັບອິນເຕີເນັດ ຫຼືໂຄງການທີ່ບໍ່ກ່ຽວຂ້ອງ. ດໍາເນີນການສະແກນໄວຣັສເປັນປະຈໍາ ແລະອັບເດດຊອບແວຕ້ານໄວຣັສ.
2.7.2.3ຖ້າຕິດຕັ້ງ OS ໃໝ່, ໃຫ້ Back UP calibrated ຂໍ້ມູນກ່ອນເພື່ອປ້ອງກັນການສູນເສຍ.
2.7.2.4ຮັບປະກັນການສະຫນອງພະລັງງານທີ່ຫມັ້ນຄົງແລະສາຍໄຟທີ່ຊັດເຈນສໍາລັບລະບົບການຄວບຄຸມ.
2.7.3Pneumatic Clamping ບໍາລຸງຮັກສາອຸປະກອນ
2.7.3.1ຫຼັງຈາກການນໍາໃຊ້ເປັນເວລາດົນນານ, lubricate ທໍ່ຂະຫຍາຍດ້ວຍນ້ໍາມັນເຄື່ອງຈັກ.
2.7.3.2ໃນເວລາທີ່ເຮັດວຽກຢູ່ໃນທໍ່ຫນຶ່ງ, ປິດວາວສະຫນອງອາກາດໃຫ້ກັບທໍ່ອື່ນໆເພື່ອປ້ອງກັນບໍ່ໃຫ້ clamps ອື່ນໆກໍາລັງຖືກໂຫຼດ, ຜົນກະທົບຕໍ່ຊີວິດ.
2.7.3.3ກ່ອນທີ່ຈະເຮັດວຽກ, ກວດເບິ່ງສາຍອາກາດສໍາລັບການອຸດຕັນ, ການຮົ່ວໄຫຼ. ລະບາຍນ້ໍາສະສົມອອກຈາກສາຍປົກກະຕິ.
2.7.4ການບໍາລຸງຮັກສາຖັງນໍ້າ
ເຮັດຄວາມສະອາດຖັງຢ່າງເປັນປົກກະຕິ, ທົດແທນນ້ໍາເພື່ອປ້ອງກັນການທໍາລາຍຂີ້ເຫຍື້ອຂອງປັ໊ມ. ປະຕິບັດການຕ້ານການ corrosion / corrosion ພາຍໃນປະຈໍາປີຫຼືອີງໃສ່ຄຸນນະພາບນ້ໍາ.
2.7.5ການບໍາລຸງຮັກສາການລົບລ້າງການກັ່ນຕອງ /
ສໍາຄັນສໍາລັບການ degassing ແລະການກັ່ນຕອງ. ເຮັດຄວາມສະອາດອົງປະກອບການກັ່ນຕອງພາຍໃນຢ່າງເປັນປົກກະຕິ: ຖອດບານເຊື່ອມຕໍ່ເທິງ, ເປີດແປນດ້ານເທິງ, ເອົາການກັ່ນຕອງ, ເຮັດຄວາມສະອາດສິ່ງເສດເຫຼືອຈາກຫນ້າຈໍ, ທົດແທນ, ປະກອບ flange ຄືນໃໝ່.
2.7.6ການຄວບຄຸມຫ້ອງ & ບໍາລຸງຮັກສາຫ້ອງປໍ້າ
2.7.6.1ຮັບປະກັນອຸນຫະພູມ / ຄວາມຊຸ່ມຊື່ນໃນຫ້ອງຕອບສະຫນອງຄວາມຕ້ອງການ. ຮັກສາແຫ້ງແລະສະອາດ.
2.7.6.2ປ້ອງກັນການສະສົມຂອງນ້ໍາໃນຫ້ອງສູບ. ເຮັດຄວາມສະອາດເປັນປົກກະຕິ.
2.7.6.3ປິດກະແສໄຟຫຼັກສະເໝີ ກ່ອນທີ່ຈະທຳຄວາມສະອາດ, ອະນາໄມ, ຫຼືກວດກາ ເພື່ອຫຼີກເວັ້ນການຖືກໄຟຟ້າຊັອດ ແລະ ບາດເຈັບ.
ຫມາຍເຫດ: ຮັກສາອຸປະກອນຊ່ວຍເອກະລາດຕາມຄູ່ມືຂອງເຂົາເຈົ້າ.
2.8 ຂັ້ນຕອນການດໍາເນີນງານຄວາມປອດໄພ
2.8.1ເສີມຂະຫຍາຍຄວາມຮັບຮູ້ຄວາມປອດໄພ. ເພີ່ມທະວີການຮັບຮູ້ຫຼຸດຜ່ອນອຸປະຕິເຫດ. ເພີ່ມທະວີຄວາມຮັບຮູ້, ໄຈ້ແຍກອັນຕະລາຍ, ຮູ້ແລະປະຕິບັດລະບຽບການດ້ານຄວາມປອດໄພແມ່ນວິທີດຽວທີ່ສາມາດລົບລ້າງອຸປະຕິເຫດ.
2.8.2ຫ້າມລະເມີດກົດລະບຽບ. ການລະເມີດກ່ອນອຸປະຕິເຫດ; ອຸປະຕິເຫດເກີດຈາກການລະເມີດ. ການຕັດມຸມເພື່ອຄວາມສະດວກ, ຄວາມໄວ, ຫຼືຄວາມພະຍາຍາມສາມາດນໍາໄປສູ່ໄພພິບັດ. ການລະເມີດຕ້ອງໄດ້ຮັບການລົບລ້າງ.
2.8.3ບັນລຸ "ສາມບໍ່ເຈັບປວດ" ຢ່າງແທ້ຈິງ: ຢ່າທໍາຮ້າຍຕົວເອງ; ບໍ່ທຳຮ້າຍຄົນອື່ນ; ຢ່າທຳຮ້າຍຄົນອື່ນ. ນີ້ແມ່ນພື້ນຖານໃນການຄຸ້ມຄອງຄວາມປອດໄພ.
2.8.4ປະຕິບັດຕາມກົດລະບຽບເວັບໄຊທ໌ທັງຫມົດຢ່າງເຂັ້ມງວດ. ໃຫ້ແນ່ໃຈວ່າອັນຕະລາຍຄວາມປອດໄພທັງຫມົດໄດ້ກໍານົດຜູ້ຮັບຜິດຊອບ.
2.8.5ຜູ້ປະຕິບັດງານຕ້ອງໄດ້ຮັບການຝຶກອົບຮົມກ່ອນທີ່ຈະເຮັດວຽກ. ຕ້ອງອ່ານ ແລະ ເຂົ້າໃຈກົດລະບຽບການຢັ້ງຢືນແຫ່ງຊາດຢ່າງລະອຽດ, ກໍານົດການສອບທຽບ, ແລະຄູ່ມືກ່ອນທີ່ຈະໄດ້ຮັບການຢັ້ງຢືນເພື່ອດໍາເນີນການ.
2.8.6ຂະຫນາດກາງ Calibration ແມ່ນນ້ໍາສະອາດ. ທົດແທນນ້ໍາໂດຍອີງໃສ່ຄວາມຂົມຂື່ນເພື່ອປ້ອງກັນການທໍາລາຍເຄື່ອງສູບນ້ໍາແລະເຄື່ອງວັດແທກມາດຕະຖານທີ່ເຮັດໃຫ້ເກີດອຸປະຕິເຫດ.
2.8.7ເຮືອສະຖຽນລະພາບແມ່ນເຮືອຄວາມກົດດັນ. ຫ້າມປະທ້ວງ ຫຼືດັດແກ້. ຮັກສາບຸກຄະລາກອນຢູ່ຫ່າງໆໃນລະຫວ່າງການປະຕິບັດງານ.
2.8.8ໃນເວລາທີ່ການຕິດຕັ້ງ / ຖອນ MUT, ສະຖານທີ່ຄວາມຫມັ້ນຄົງ. ຢ່າໃສ່ນິ້ວມືເຂົ້າໄປໃນຕົວເຊື່ອມຕໍ່ຫຼືຮູ້ສຶກວ່າມີຮູ screw. ຖື spacers ຢູ່ດ້ານຂ້າງໃນເວລາວາງ / ເອົາອອກ.
2.8.9ຫຼັງຈາກການຕິດຕັ້ງ / ການມອບຫມາຍ, ຢ່າ disassemble ເປັນສ່ວນຕົວເພື່ອຫຼີກເວັ້ນການສ່ວນປະກອບທີ່ທໍາລາຍ.
28.10ຢ່າປ່ຽນເຄື່ອງໂຮສຄອມພິວເຕີດ້ວຍຕົວຕົນ. ຢ່າໃຊ້ອິນເຕີເນັດ ຫຼືໂປຣແກຣມທີ່ບໍ່ກ່ຽວຂ້ອງ. ສະແກນຫາໄວຣັສເປັນປະຈຳ ແລະອັບເດດ antivirus.
28.11ຫ້າມສຽບປລັກສຽບຮ້ອນ/ຕັດການເຊື່ອມຕໍ່ເຄື່ອງເຊື່ອມຕໍ່ ຫຼືປລັກສຽບໃດໆ.
28.12ຢ່າລຶບໄຟລ໌ສຳຮອງຂອງລະບົບປະຕິບັດການ.
28.13ເມື່ອໃຊ້ອາກາດອັດແໜ້ນ, ໃຫ້ກວດເບິ່ງລະບົບລະບາຍອາກາດ ແລະ ປ່ຽງຄວາມປອດໄພຢູ່ສະເໝີ ເພື່ອປ້ອງກັນຊ່ອງລະບາຍອາກາດທີ່ຖືກປິດກັ້ນທີ່ເຮັດໃຫ້ເກີດຄວາມກົດດັນເກີນໃນຖັງ/ສາຍ.
28.14ເຈາະຫົວທໍ່ອາກາດໄປຫາພື້ນທີ່ທີ່ບໍ່ມີປະຊາກອນ, ພື້ນດິນ, ຫຼືທ້ອງຟ້າ. ຢ່າຊີ້ໃສ່ອຸປະກອນ, ບຸກຄະລາກອນ, ເສັ້ນທາງ, ຫຼືທາງເຂົ້າ.
28.15ປິດໄຟຫຼັກກ່ອນທຳຄວາມສະອາດ, ອະນາໄມ, ຫຼືກວດກາ. ປ້ອງກັນການພວນອົງປະກອບ, ການຊ໊ອກໄຟຟ້າ, ແລະການບາດເຈັບ.
28.16ກ່ອນທີ່ຈະອອກເດີນທາງປະຈໍາວັນ, ຜູ້ປະຕິບັດງານຕ້ອງກວດເບິ່ງວ່າປະຕູ / ປ່ອງຢ້ຽມແລະພະລັງງານຖືກປິດ, ຮັບປະກັນຄວາມປອດໄພຂອງສະຖານທີ່.
2.9 ການດໍາເນີນງານແລະບໍາລຸງຮັກສາຕູ້ແປງຄວາມຖີ່
2.9.1ການນໍາໃຊ້: ທໍາອິດກວດເບິ່ງຕູ້ສໍາລັບສຽງ / ກິ່ນຜິດປົກກະຕິ. ຖ້າຕົກລົງ, ເປີດສະວິດວົງຈອນຄວບຄຸມຫຼັກ (ເປີດເຄື່ອງ). ປຸ່ມສີຂຽວ (Power ON) ແສງສະຫວ່າງໃນຕູ້, ພັດລົມເລີ່ມ, ປຸ່ມສີແດງຍັງເປີດ. ໃນປັດຈຸບັນ pump start / stop ສາມາດຄວບຄຸມຜ່ານຄອມພິວເຕີ. Voltmeter ສະແດງໃຫ້ເຫັນ ~ 380V, ammeter ສະແດງໃຫ້ເຫັນປະຈຸບັນປະຕິບັດງານ.
2.9.2Pump Start: ຕ້ອງເລີ່ມໃນໂຫມດ VFD. ໃຊ້ການໂຕ້ຕອບຄອມພິວເຕີເພື່ອປັບຜົນຜະລິດ VFD ເພື່ອປ່ຽນຄວາມໄວຂອງມໍເຕີ.
2.9.3ຢ່າຕັ້ງຄວາມຖີ່ VFD ໂດຍກົງໃຫ້ສູງສຸດໃນລະຫວ່າງການປະຕິບັດງານ. ກະແສ inrush ສູງເກີນໄປ, ອາດຈະເຮັດໃຫ້ອຸປະກອນເສຍຫາຍ.
2.9.4Shutdown: ທໍາອິດຢຸດ motors ທັງຫມົດໂດຍຜ່ານຄອມພິວເຕີ. ຈາກນັ້ນກົດປຸ່ມສີແດງ (ປິດເຄື່ອງ) ເທິງຕູ້ຈົນກວ່າໄຟສີແດງທັງໝົດຈະປິດ. ສຸດທ້າຍ, ປິດສະຫຼັບມີດພະລັງງານຕົ້ນຕໍ.
2.9.5ປຸ່ມເລືອກຄູ່ມື/ອັດຕະໂນມັດ ແລະກຸ່ມປຸ່ມເລີ່ມ/ຢຸດຄວາມຖີ່ຂອງສາຍ VFD/ສາຍຢູ່ໃນຕູ້ແມ່ນບໍ່ແນະນຳສຳລັບການປັບທຽບແບບປົກກະຕິ. ພວກເຂົາເຈົ້າແມ່ນສໍາລັບການບໍາລຸງຮັກສາອຸປະກອນແລະການ debugging pump ເທົ່ານັ້ນ.
ຖ້າການດີບັກຕ້ອງການປ່ຽນການຕັ້ງຄ່າ VFD (ຕັ້ງເປັນໂໝດຄວບຄຸມແຜງ), ເບິ່ງຄູ່ມື VFD.
2.9.6ຕູ້ໄຟຟ້າແລະມໍເຕີປັ໊ມຕ້ອງໄດ້ຮັບການກວດກາເປັນປົກກະຕິໂດຍຜູ້ຊ່ຽວຊານ. ປະຕິບັດຕາມຂັ້ນຕອນສໍາລັບການກວດສອບແຕ່ລະໄລຍະຂອງອົງປະກອບໄຟຟ້າ. ປ່ຽນຊິ້ນສ່ວນທີ່ເສຍຫາຍທັນທີ. ຮັບປະກັນການເຮັດວຽກປົກກະຕິ. ຜູ້ປະກອບການຕ້ອງປະຕິບັດຕາມຂັ້ນຕອນ. ຮັບປະກັນຄວາມປອດໄພສ່ວນຕົວ!
2.10 ຄູ່ມືການສ້ອມແປງອຸປະກອນ
ຄູ່ມືນີ້ລະບຸຮອບວຽນການບໍາລຸງຮັກສາສະຖານທີ່, ເນື້ອໃນ, ການດູແລ, ແລະການແກ້ໄຂບັນຫາ. ມັນເຮັດຫນ້າທີ່ເປັນເອກະສານອ້າງອີງສໍາລັບຜູ້ປະຕິບັດງານແລະພະນັກງານບໍາລຸງຮັກສາ. ແຫຼ່ງຂໍ້ມູນປະກອບມີ:
(1) ອຸປະກອນທີ່ມາພ້ອມກັບຄູ່ມື;
(2) ລະບຽບການວັດແທກການໄຫຼເຂົ້າທີ່ກ່ຽວຂ້ອງ ແລະ ສະເພາະ;
(3) ປື້ມອ້າງອີງການສ້ອມແປງກົນຈັກ ແລະເຕັກໂນໂລຊີຂະບວນການ.
2.10.1ວົງຈອນການບໍາລຸງຮັກສາ
ສາມາດປັບໄດ້ໂດຍອີງໃສ່ການຕິດຕາມສະພາບແລະສະຖານະການອຸປະກອນ.
ຕາຕະລາງການບໍາລຸງຮັກສາ:
| ລາຍການບໍາລຸງຮັກສາ | ປະເພດການບໍາລຸງຮັກສາ | ການສ້ອມແປງເລັກນ້ອຍ | ການສ້ອມແປງທີ່ສໍາຄັນ |
| ປັ໊ມ centrifugal | ຮອບວຽນ | 8-12 ເດືອນ | 12-24 ເດືອນ |
| ເຄື່ອງອັດອາກາດ | ຮອບວຽນ | ||
| ອຸປະກອນຂະບວນການ | ຮອບວຽນ | ||
| ລະບົບຄວບຄຸມ | ຮອບວຽນ |
2.10.2ເນື້ອໃນການບຳລຸງຮັກສາ ແລະສ້ອມແປງ
2.10.2.1ປັ໊ມ centrifugal
A. ການແກ້ໄຂບັນຫາ ແລະ ການສ້ອມແປງ
| ບັນຫາ | ສາເຫດທີ່ເປັນໄປໄດ້ | ວິທີແກ້ໄຂ |
| ປັ໊ມບໍ່ເລີ່ມຕົ້ນ | ການເຊື່ອມຕໍ່ຖືກຂັດຈັງຫວະ | ກວດເບິ່ງສາຍໄຟ, ແກ້ໄຂຖ້າຈໍາເປັນ |
| ຟິວເປົ່າ | ປ່ຽນຟິວ | |
| ການປ້ອງກັນມໍເຕີຢຸດ | ກວດເບິ່ງການຕັ້ງຄ່າການປົກປ້ອງ, ແກ້ໄຂຖ້າຜິດພາດ | |
| ການປ້ອງກັນມໍເຕີບໍ່ສະຫຼັບ, ການຄວບຄຸມຜິດພາດ | ກວດເບິ່ງການຄວບຄຸມການປ້ອງກັນມໍເຕີ, ແກ້ໄຂຖ້າຜິດພາດ | |
| ມໍເຕີຈະບໍ່ເລີ່ມຕົ້ນ / ເລີ່ມຕົ້ນຍາກ | ແຮງດັນ/ຄວາມຖີ່ ຫຼຸດລົງ spec | ປັບປຸງການສະຫນອງພະລັງງານ, ກວດເບິ່ງສາຍຂ້າມສາຍ |
| ທິດທາງການຫມຸນຜິດ | ການເຊື່ອມຕໍ່ມໍເຕີຜິດພາດ | ແລກປ່ຽນສອງໄລຍະ |
| ການສູນເສຍຄວາມໄວຢ່າງຮຸນແຮງພາຍໃຕ້ການໂຫຼດ | ໂຫຼດເກີນ | ວັດແທກພະລັງງານ, ໃຊ້ມໍເຕີຂະຫນາດໃຫຍ່ຫຼືຫຼຸດຜ່ອນການໂຫຼດຖ້າຈໍາເປັນ |
| ແຮງດັນຫຼຸດລົງ | ເພີ່ມສ່ວນຂ້າມສາຍ | |
| ມໍເຕີ hums, ກະແສໄຟຟ້າສູງ | ຂໍ້ບົກພ່ອງຂອງ winding | ສົ່ງມໍເຕີສໍາລັບການສ້ອມແປງມືອາຊີບ |
| rotor rubbing | ||
| Fuse ພັດທັນທີ / ການເດີນທາງ Prot | ວົງຈອນສັ້ນ | ແກ້ໄຂວົງຈອນສັ້ນ |
| ມໍເຕີວົງຈອນສັ້ນ | ສົ່ງມໍເຕີສໍາລັບການສ້ອມແປງມືອາຊີບ | |
| ສາຍໄຟຜິດພາດ | ວົງຈອນທີ່ຖືກຕ້ອງ | |
| ຄວາມຜິດພາດຂອງມໍເຕີ | ສົ່ງມໍເຕີສໍາລັບການສ້ອມແປງມືອາຊີບ | |
| ມໍເຕີຮ້ອນເກີນ (ວັດແທກ) | ໂຫຼດເກີນ | ວັດແທກພະລັງງານ, ໃຊ້ມໍເຕີຂະຫນາດໃຫຍ່ຫຼືຫຼຸດຜ່ອນການໂຫຼດຖ້າຈໍາເປັນ |
| ຄວາມເຢັນບໍ່ດີ | ປັບປຸງກະແສລົມເຢັນ, ລະບາຍອາກາດໃຫ້ສະອາດ, ເພີ່ມພັດລົມບັງຄັບຖ້າຕ້ອງການ | |
| ອຸນຫະພູມອາກາດສູງ | ຢູ່ໃນຂອບເຂດທີ່ອະນຸຍາດ | |
| ການເຊື່ອມຕໍ່ວ່າງ (ການສູນເສຍໄລຍະ) | ແກ້ໄຂການຕິດຕໍ່ທີ່ບໍ່ດີ | |
| ຟິວເປົ່າ | ຊອກຫາ/ແກ້ໄຂສາເຫດ (ເບິ່ງຂ້າງເທິງ), ປ່ຽນຟິວ |
B. ການບໍາລຸງຮັກສາອຸປະກອນ: ຄືກັນກັບພາກ2.7.1
2.10.2.3ອຸປະກອນຂະບວນການ (Clamps, Diverter, Valves)
A. ການແກ້ໄຂບັນຫາ ແລະ ການສ້ອມແປງ
| ບັນຫາ | ສາເຫດທີ່ເປັນໄປໄດ້ | ວິທີແກ້ໄຂ | |
| Clamp ຍາກໃນການເລີ່ມຕົ້ນ | ຄວາມກົດດັນອາກາດຕໍ່າ | ກວດສອບການຮົ່ວໄຫລ, ປັບລະບຽບການ / lubricator | |
| ແຮງຍຶດບໍ່ພຽງພໍ | |||
| ຕຳແໜ່ງການຕິດຕັ້ງບໍ່ສະຖຽນ | ປ່ຽງຄູ່ມືບໍ່ເຮັດວຽກຢ່າງເຕັມທີ່ | ||
| ການຫລໍ່ລື່ນທໍ່ທີ່ບໍ່ດີ | ຕື່ມນໍ້າມັນຜ່ານທໍ່ລົມ | ||
| ກະບອກສູບເສຍຫາຍ | ກວດເບິ່ງ ແລະປ່ຽນແທນ | ||
| ຄວາມໄວ Clamp ໄວເກີນໄປ / ຊ້າ | ຄວາມກົດດັນອາກາດຕໍ່າ | ປັບປ່ຽງ throttle inlet | |
| ຄວາມດັນອາກາດສູງ | ປັບປ່ຽງ throttle inlet | ||
| ກະບອກສູບເສຍຫາຍ | ກວດເບິ່ງ ແລະປ່ຽນແທນ | ||
| Diverter ຍາກທີ່ຈະເລີ່ມຕົ້ນ | ຄວາມກົດດັນອາກາດຕໍ່າ | ກວດສອບການຮົ່ວໄຫລ, ປັບລະບຽບການ / lubricator | |
| ຄວາມໄວສະຫຼັບຊ້າ | |||
| ການປ່ຽນຕຳແໜ່ງບໍ່ຮອດ | ກວດເບິ່ງປ່ຽງ solenoid, ການສ້ອມແປງ | ||
| ການຫລໍ່ລື່ນທໍ່ inlet ບໍ່ດີ | ຕື່ມນໍ້າມັນຜ່ານທໍ່ລົມ | ||
| ກະບອກສູບເສຍຫາຍ | ກວດເບິ່ງ ແລະປ່ຽນແທນ | ||
| Diverter ເວລາແຕກຕ່າງຈາກ spec | ການສະຫຼັບຊ້າຍ / ຂວາບໍ່ synchronous | ປັບພອດເຕົ້າສຽບປ່ຽງ solenoid valve | |
| ໄສ້ photoelectric ບໍ່ຖືກຕ້ອງ | ກວດເບິ່ງ & ປັບຕໍາແຫນ່ງໄສ້ | ||
| Valve ຍາກທີ່ຈະເລີ່ມຕົ້ນ | ຄວາມກົດດັນອາກາດຕໍ່າ | ກວດສອບການຮົ່ວໄຫລ, ປັບລະບຽບການ / lubricator | |
| ຄວາມໄວສະຫຼັບຊ້າ | |||
| ກະບອກສູບ Actuator ຮົ່ວອາກາດ | ປ່ຽນປະທັບຕາ | |
| ປ່ຽງ solenoid ບໍ່ເຮັດວຽກ | ກວດສອບແລະສ້ອມແປງ |
B. ການບໍາລຸງຮັກສາອຸປະກອນ: ຕໍ່ພາກ2.7.3 ແລະ28.13.
2.10.2.4ລະບົບຄວບຄຸມ
A. ການແກ້ໄຂບັນຫາ ແລະ ການສ້ອມແປງ
| ບັນຫາ | ສາເຫດທີ່ເປັນໄປໄດ້ | ວິທີແກ້ໄຂ |
| ຄອມພິວເຕີຜິດພາດ | ຄອມພິວເຕີບໍ່ເຮັດວຽກ | ກວດສອບແລະສ້ອມແປງ |
| ສາຍເປີດຫຼືຕິດຕໍ່ບໍ່ດີ | ກວດເບິ່ງ ແລະປ່ຽນສາຍ | |
| ສະຖານີເປີດ ຫຼືຕິດຕໍ່ບໍ່ດີ | ແທນທີ່ສະຖານີ | |
| ຊອບແວລະບົບເສຍຫາຍ | ຕິດຕັ້ງລະບົບຄືນໃໝ່ຫຼັງຈາກແຈ້ງພວກເຮົາ | |
| ບໍ່ມີຂໍ້ມູນເຄື່ອງມື | Instrument-Control cab connection ເປີດ/ບໍ່ດີ | ກວດເບິ່ງສາຍໄຟ & ຟິວ ປ່ຽນ terminal ຫຼື fuse ປ່ຽນເຄື່ອງສົ່ງສັນຍານ |
| ບໍ່ມີການສະແດງອຸນຫະພູມ / ຄວາມກົດດັນ | Temp/Pressure Tx-Control cab ເປີດ/ບໍ່ດີ | |
| ຄວາມຜິດຂອງພະລັງງານສັນຍານ | ໂມດູນພະລັງງານຫຼືສາຍເຄເບີ້ນຜິດພາດ | ປ່ຽນໂມດູນຫຼືສາຍ |
| Cab ຄວບຄຸມບໍ່ມີການຕອບສະຫນອງ | ຄວບຄຸມພອດ cab ຫຼືສາຍເຄເບີ້ນເສຍຫາຍ | ປ່ຽນບ່ອນຈອດລົດ ຫຼືສາຍເຄເບີ້ນ |
- ການບໍາລຸງຮັກສາລະບົບການຄວບຄຸມ:
- ສະເຫມີປະຕິບັດການກໍາຈັດຂີ້ຝຸ່ນເປັນປົກກະຕິກ່ຽວກັບຕູ້ຄວບຄຸມຢ່າງເຂັ້ມງວດໃນເວລາທີ່ການສະຫນອງພະລັງງານຖືກຕັດ.
- ຫ້າມໃຊ້ຄອມພິວເຕີຂອງອຸປະກອນນີ້ເພື່ອເຂົ້າເຖິງອິນເຕີເນັດ ຫຼືຕິດຕັ້ງໂປຣແກຣມທີ່ບໍ່ກ່ຽວຂ້ອງກັບການເຮັດວຽກ; ປະຕິບັດການສະແກນໄວຣັສຢ່າງທັນເວລາ ແລະຮັກສາຊອບແວປ້ອງກັນໄວຣັສໃຫ້ອັບເດດ.
- ຖ້າຕິດຕັ້ງລະບົບຄືນໃໝ່, ໃຫ້ຮັບປະກັນການສໍາຮອງຂໍ້ມູນການປັບທຽບເພື່ອປ້ອງກັນການສູນເສຍຂໍ້ມູນການຢັ້ງຢືນ.
- ຮັບປະກັນການສະຫນອງພະລັງງານທີ່ຫມັ້ນຄົງແລະວົງຈອນທີ່ບໍ່ມີການຂັດຂວາງສໍາລັບລະບົບການຄວບຄຸມ.
- ກວດເບິ່ງສາຍສັນຍານຢູ່ແຜງຄວບຄຸມ I/O ຂອງຕູ້ຄວບຄຸມເປັນປະຈຳ. ຮັດການເຊື່ອມຕໍ່ທີ່ວ່າງໆດ້ວຍ screwdriver ຫົວແປ.
- ກວດສອບເປັນໄລຍະເວລາຖ້າຫາກວ່າສະວິດ / knobs ໃນກະດານຄວບຄຸມ rotate ປົກກະຕິ. ຖ້າການ slippage ເກີດຂຶ້ນ, ກວດເບິ່ງ screws fixing ວ່າງແລະ tighten ໃຫ້ເຂົາເຈົ້າ; ທົດແທນຖ້າເສຍຫາຍ.
- ລ້າງໄຟຟ້າສະຖິດຈາກເຄື່ອງຕັດວົງຈອນການຮົ່ວໄຫຼຂອງແຜ່ນດິນໂລກ (ELCB) ປະຈໍາເດືອນ.
2.10.2.5ການທົດສອບການດໍາເນີນການແລະການຍອມຮັບ
A. ການກະກຽມ Pre-Test: ຢືນຢັນການສໍາເລັດການສ້ອມແປງ, ຄຸນນະພາບ, ບັນທຶກ; ສະຖານທີ່ສະອາດ; ເຄື່ອງມື / ການຄວບຄຸມ / interlocks debugged; ລະບົບນ້ໍາມັນເຕັມ; ລະບົບລະບາຍອາກາດ / ລະບາຍອາກາດ; ສ້ອມແປງລະບົບໄຟຟ້າ; ເຄື່ອງມືພ້ອມ.
B. ການທົດສອບແລ່ນ: ການທົດສອບບໍ່ມີການໂຫຼດ; ຢືນຢັນລະບົບນ້ຳມັນ/ນ້ຳ/ອາກາດ/ໄຟຟ້າ/ເຄື່ອງມືປົກກະຕິ; ດໍາເນີນການ 72 ຊົ່ວໂມງທີ່ບໍ່ມີບັນຫາກ່ອນທີ່ຈະຍອມຮັບ; ການຍອມຮັບລົງນາມໂດຍບຸກຄະລາກອນທີ່ກ່ຽວຂ້ອງ.